...
Nach dem Druck sollten alle Teile sauber gemacht. Es empfiehlt sich mit einem Elektro Mini Grinder die 3D-Teile zu schleifen bzw. zu säubern. Ist dies erledigt kann man mit dem Aufbauen beginnen.
Zusammenbau der 3D Teile:
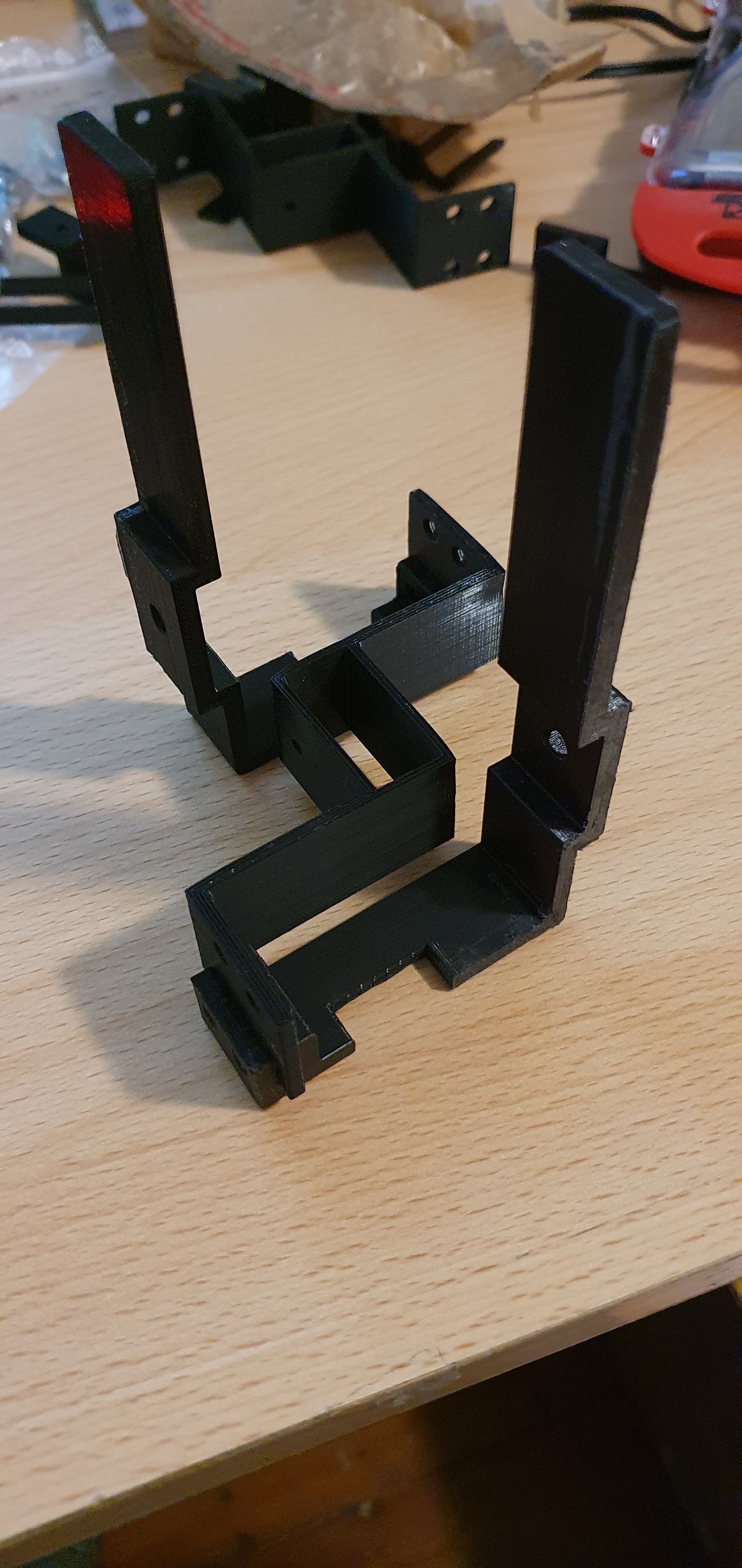
1. Ein Brücken-teil mit dem Motormodul zusammenstecken bzw. schrauben (Die genutzen genutzten Schrauben M3*20mm mit M3 Muttern)
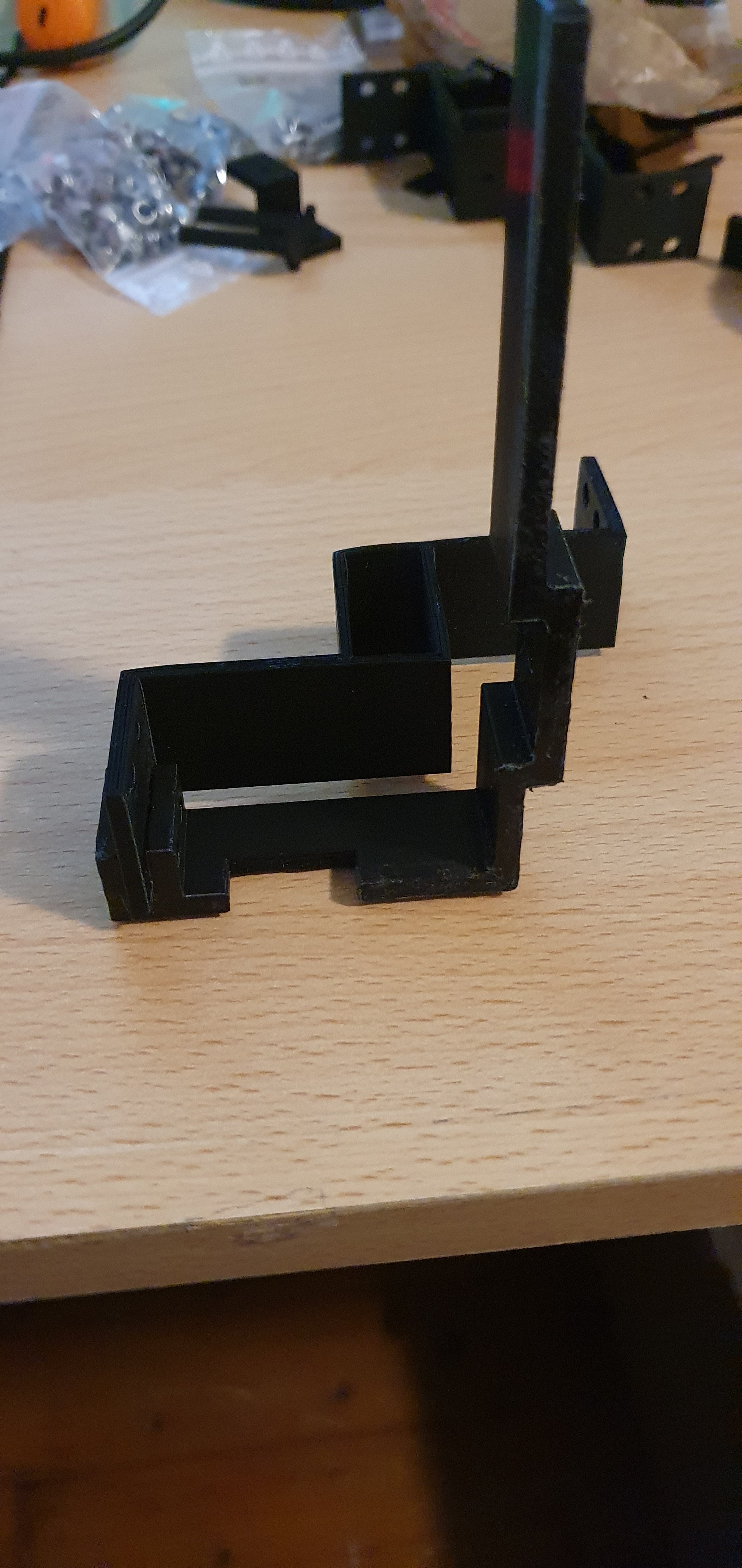
2. Das zweite Brücken-teil mit dem Motormodul zusammenstecken (Die genutzen genutzten Schrauben M3*20mm mit M3 Muttern)
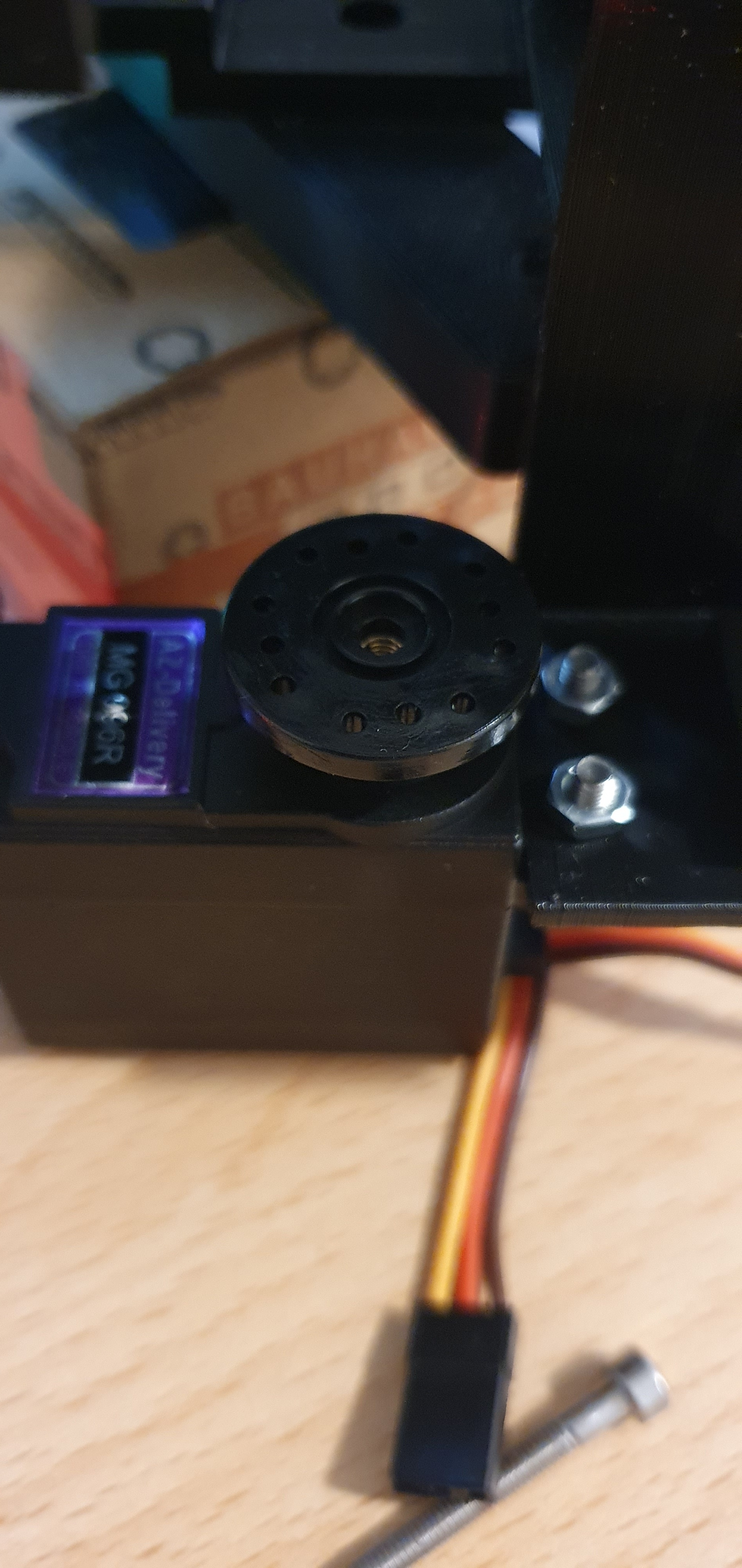
3. Die Motoren an die Brücken-teile anschrauben (Die genutzen genutzten Schrauben M3*10mm mit M3 Muttern)
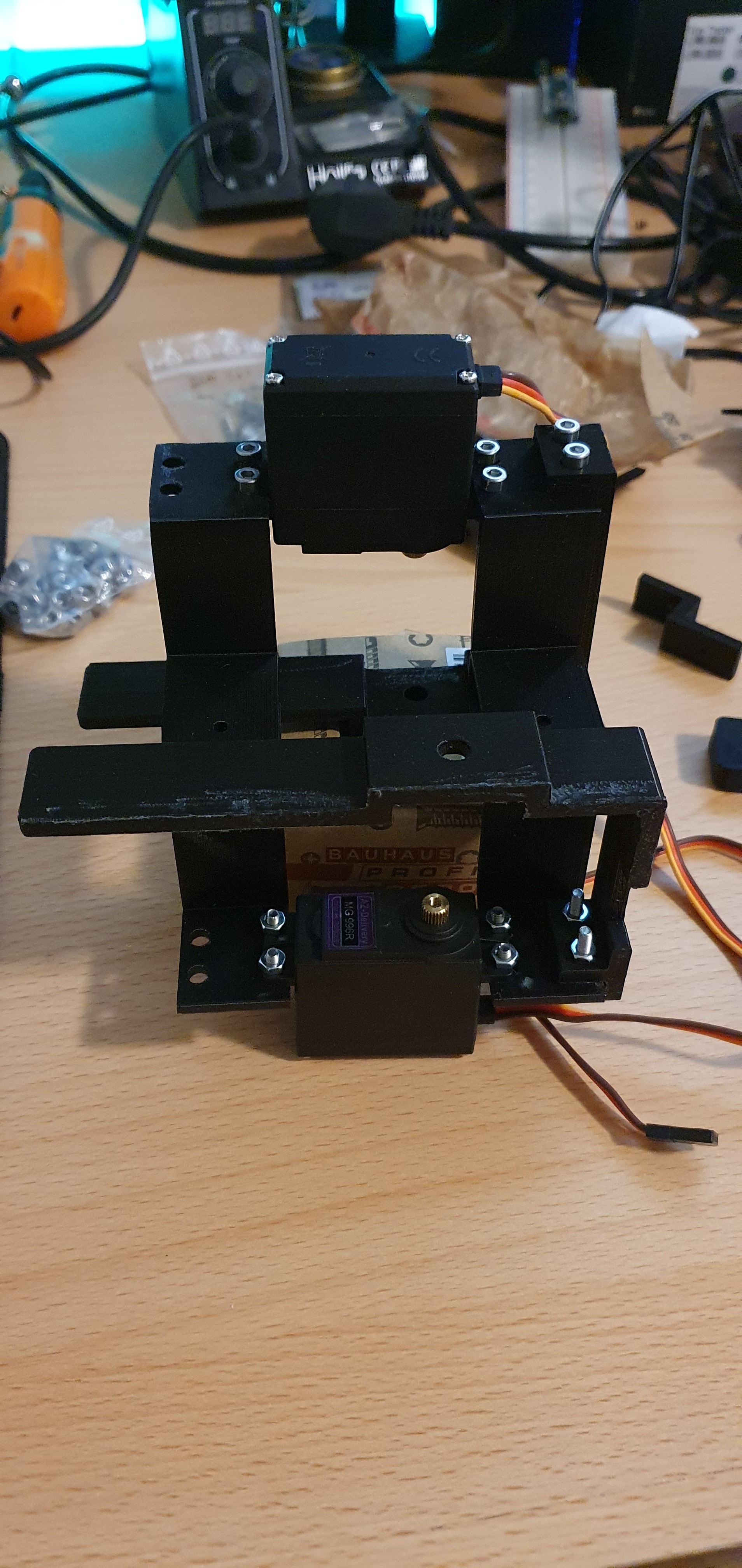
4. Die Rad Komponente auf die Motoren stecken
5. Das Holzstück mit den Maßen L/B/H 290/30/13 mm in die Motormodule stecken
6. Das Motormodul an das Holzstück schrauben. eweils jeweils oben und unten des Motormodules. (Holzbauschraube 2mm*12mm)
7. Den Brückenklip an das Motormodul schrauben sowie an die Brücke mit einer M3*10mm
8. Die Kameraschraube (Maße 1/4 Schraube mit Durchmesser von 12mm und Länge 14mm) in das Trackermodul stecken, damit das Gewinde unten rausguckt.
9. Trackermodul mit der Schraube an einen HTC Vive Tracker Schrauben
10. Als nächstes steckt man den unteren Teil des Holzstückes in das Griff Modul und befestigt das Griff Modul an das Holz mit Holzbauschrauben.
11. Das Trackermodul mitsamt Tracker an das Holzstück mit den Holzbauschraube schrauben

1112. Fäacher Fächer vorbereiten - den Stift aus dem Fächer und die Löcher vorbereiten, dass die M3*55mm Schraube hinein passt.
1312. Es müssen 11.5mm vom der Fächer abgesägt werden, damit sich die Fächer öffnen können.
13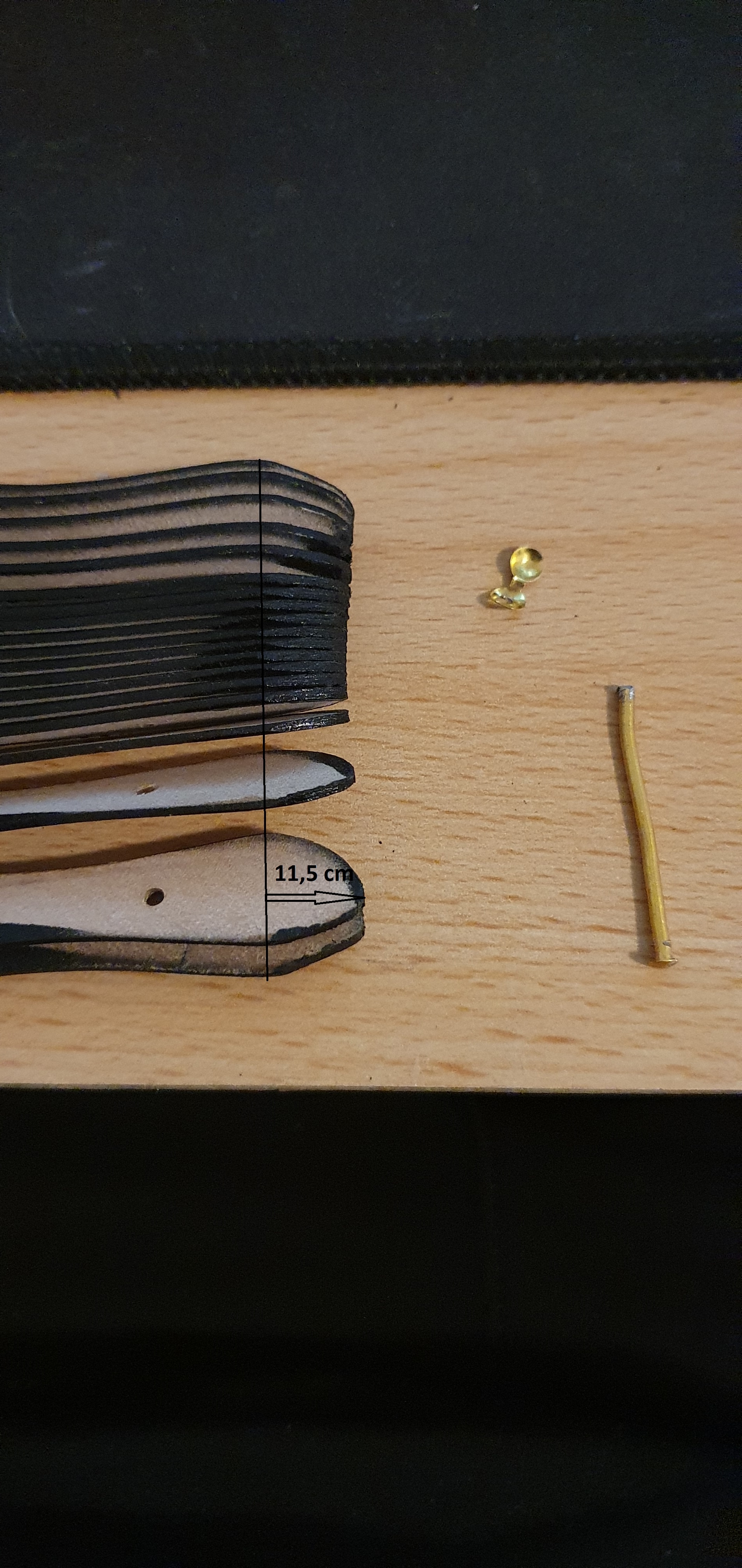
14. Ein M3 Mutter in die Fächerhebel legen.
1415. Einen doppelseitigen Selbstklebestrip auf den Fächerhebel kleben
1516. Auf die Rad Komponente rund herum auch den doppelseitigen Selbstklebestrip kleben (Nicht die Mitte zu kleben)
1617. Auf die Innenseite vom Brücken-teil auch einen Streifen vom doppelseitigen Selbstklebestrip kleben
1718. Einen kleinen Streifen vom doppelseitigen Selbstklebestrip auf die kurze Seite von dem Arm zum Sammeln vom Fächer kleben
1819. Die Fächerhebel Komponente auf die Rad Komponente kleben
1920. Den Fächer auf die Fächerhebel Komponente kleben
2021. Dann durch den Fächer, der Facherhebel Fächerhebel Komponente und zum Schluss in den Motor eine M3*55mm Schraube drehen.
2122. Mit einer Holzbauschraube den Brückenclip in das Holzstück und dem Motormodul schrauben und in die anderen Seite vom Brückenclip eine M3*10mm Schraube schrauben mit einer M3 Mutter auf der anderen Seite
2223. Jeweils ein Brückenclip an die Seite vom Fächerhebel kleben und ein Brückenclip an die Brücke kleben
Das Ergebnis:


5. Die Schaltung für den Controller aufbauen
Nach dem Zusammenbau der Drag:On Controller, muss jetzt noch die Elektronik zusammengebaut werden.
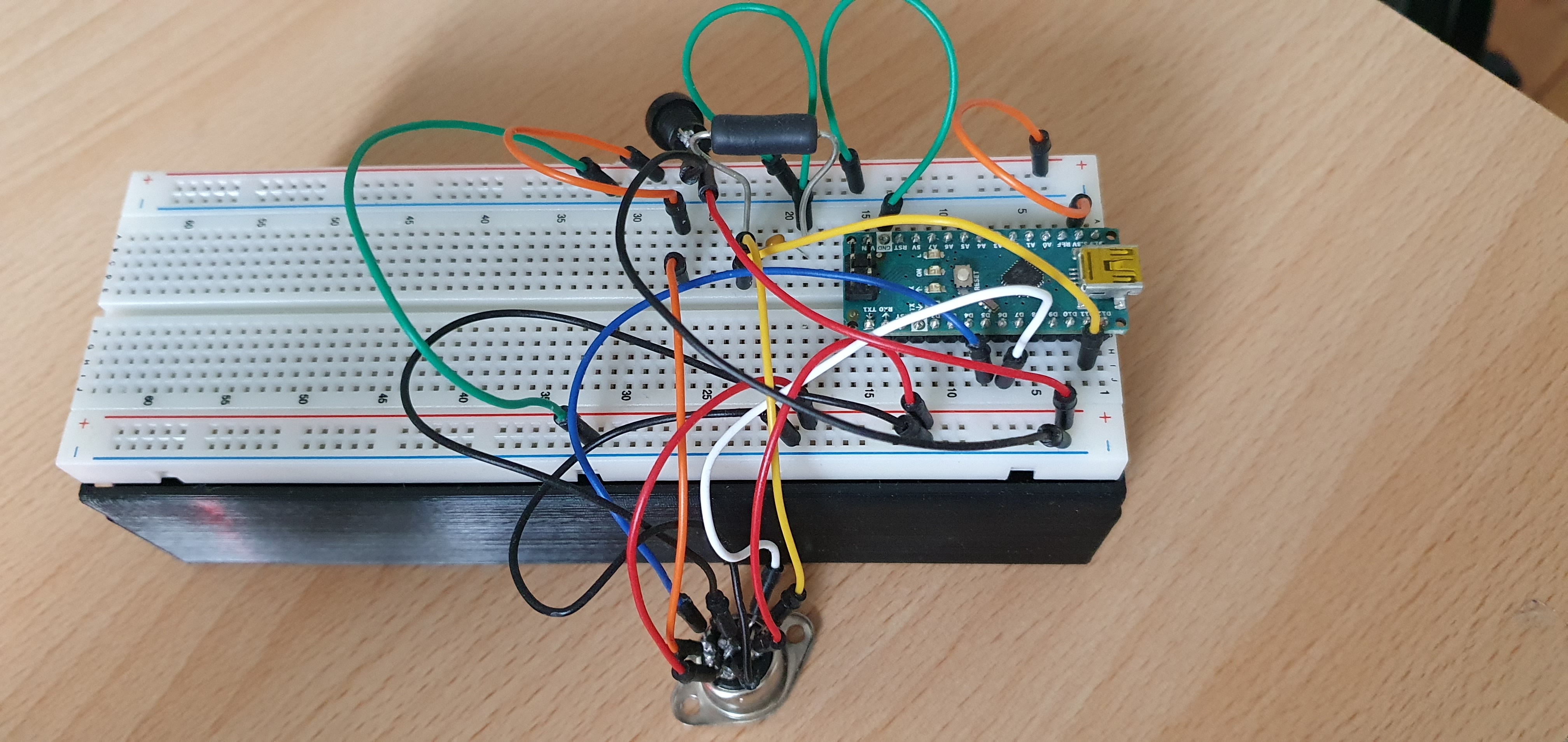
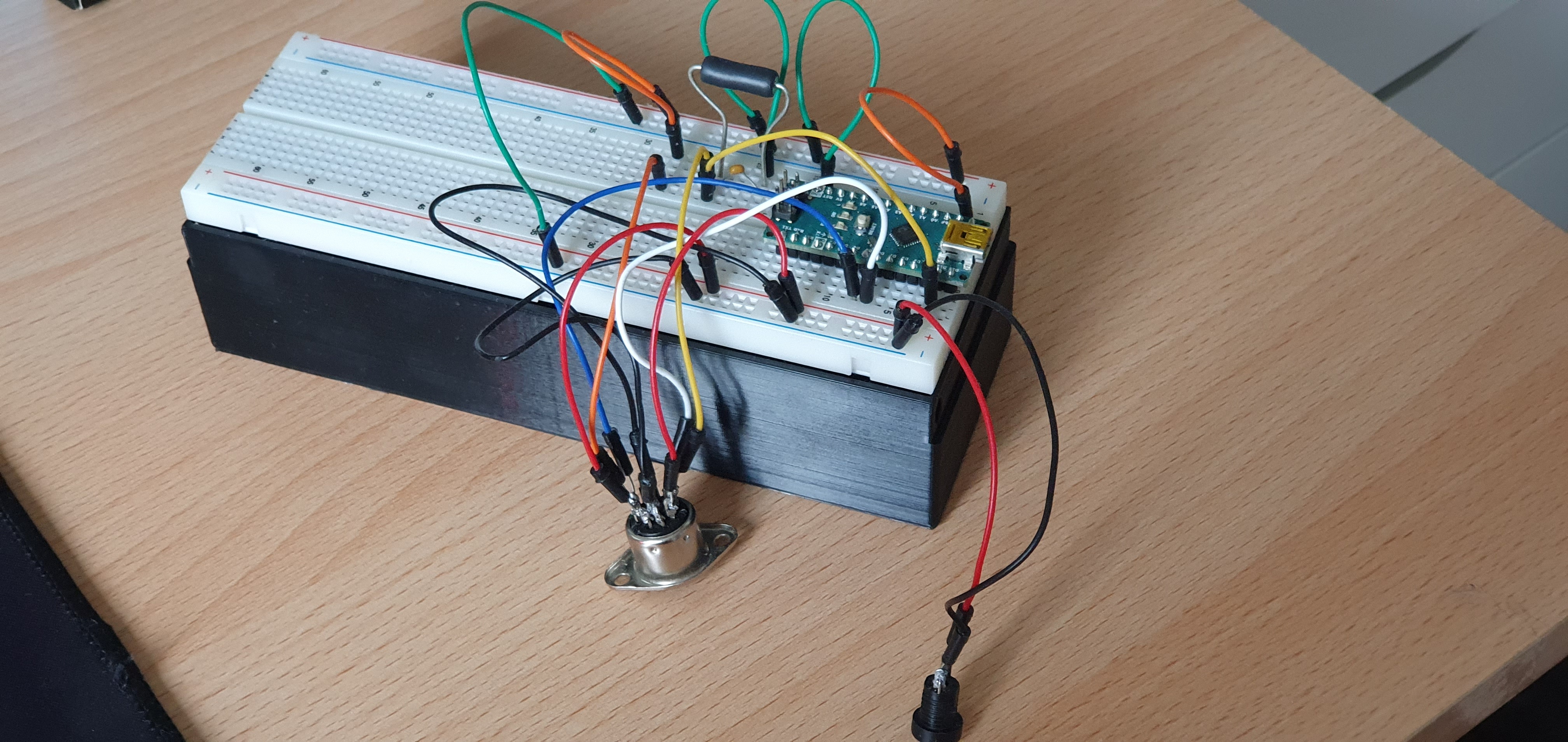
Zusammenbau der Elektrik
1. Den Arduino Nano in Spalten C-G und Reihe 1-15 stecken
2. Widerstand in Spalte B und Reihe 19, 23 stecken
3. Kondensator in Spalte C und Reihe 19, 23 stecken
4. Anschließend die Jumper Wire wie folgt anstecken:
5. Ein Jumper Wire an den Lötanschluss vom DC Power Jack anschließen (Der längere Anschluss ist positiv der kürzere ist negativ)
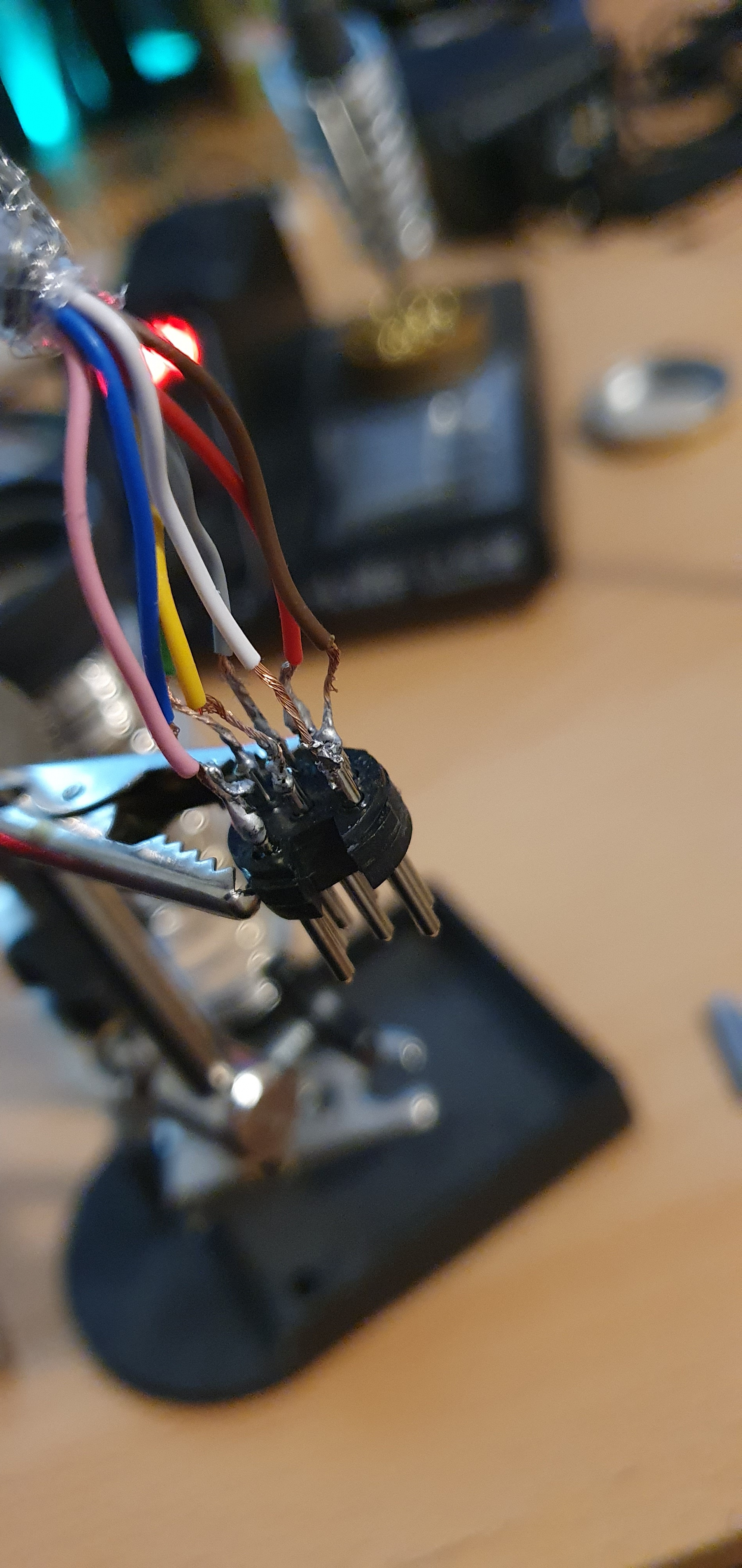
6. Die 8-polige Steuerleitung an den 8-polige DIN-Stecker löten

7. 8 Pin DIN Female Stecker laut Plan (siehe Bild) löten:
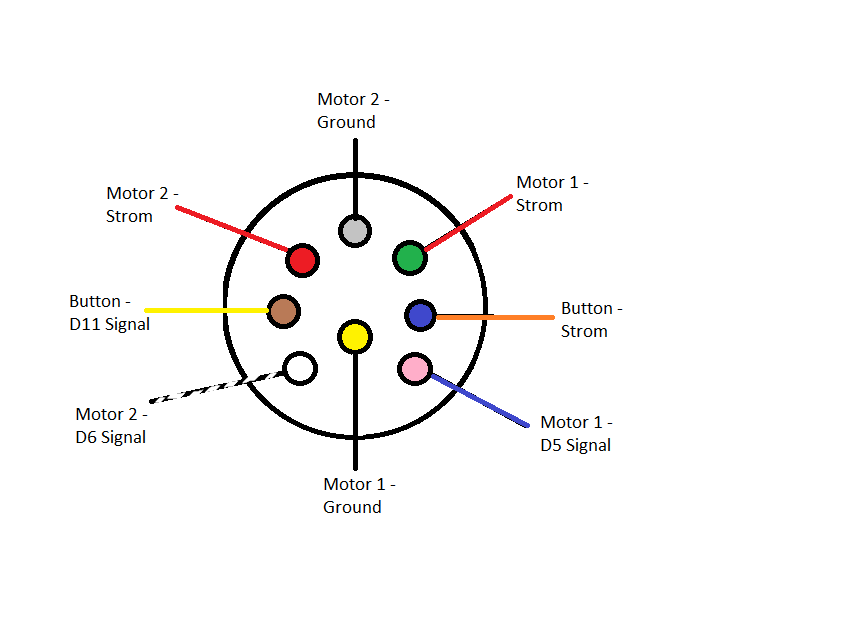
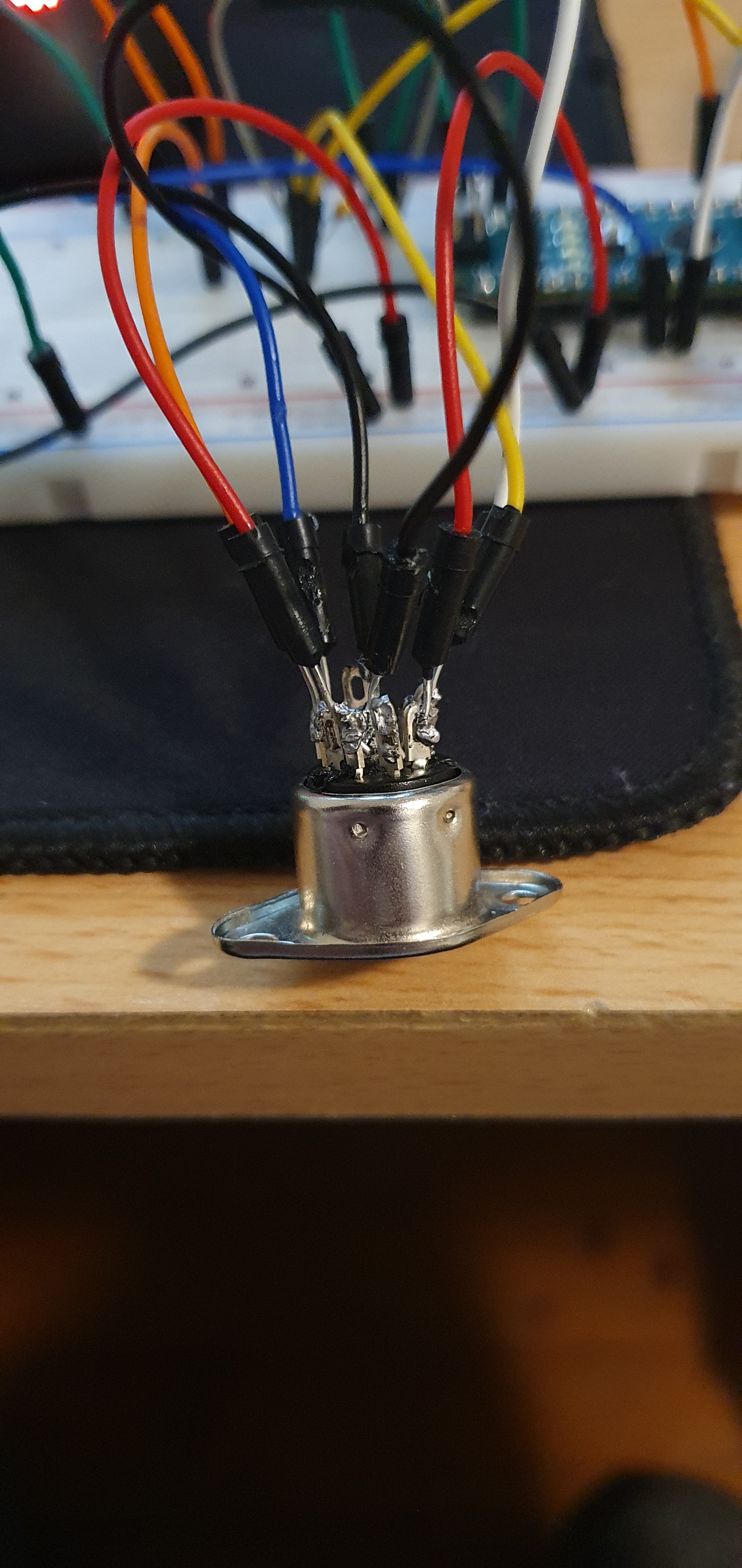
8. Die andere Seite die 8-polige Steuerleitung löten an jeden Pol ein Jumper Wire an

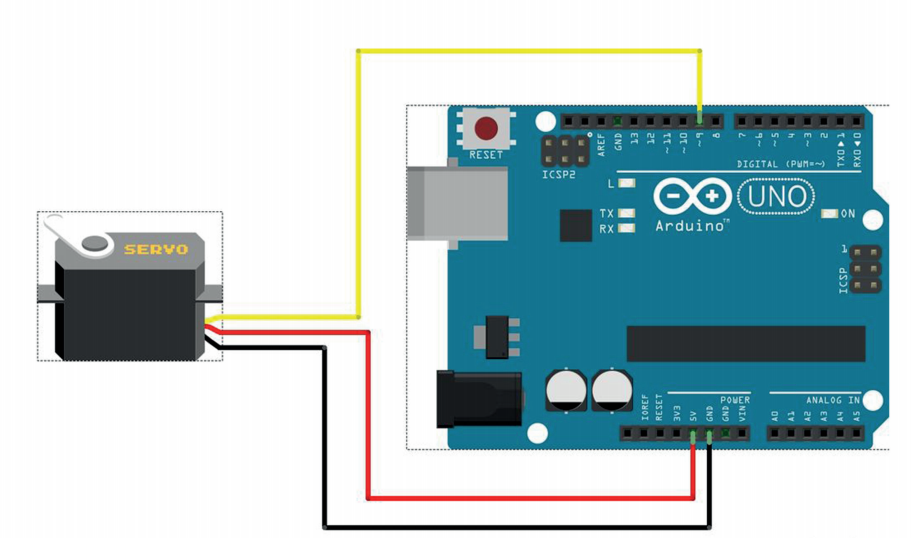
9. Dann die Jumper Wire laut Plan an die Servo Motoren stecken
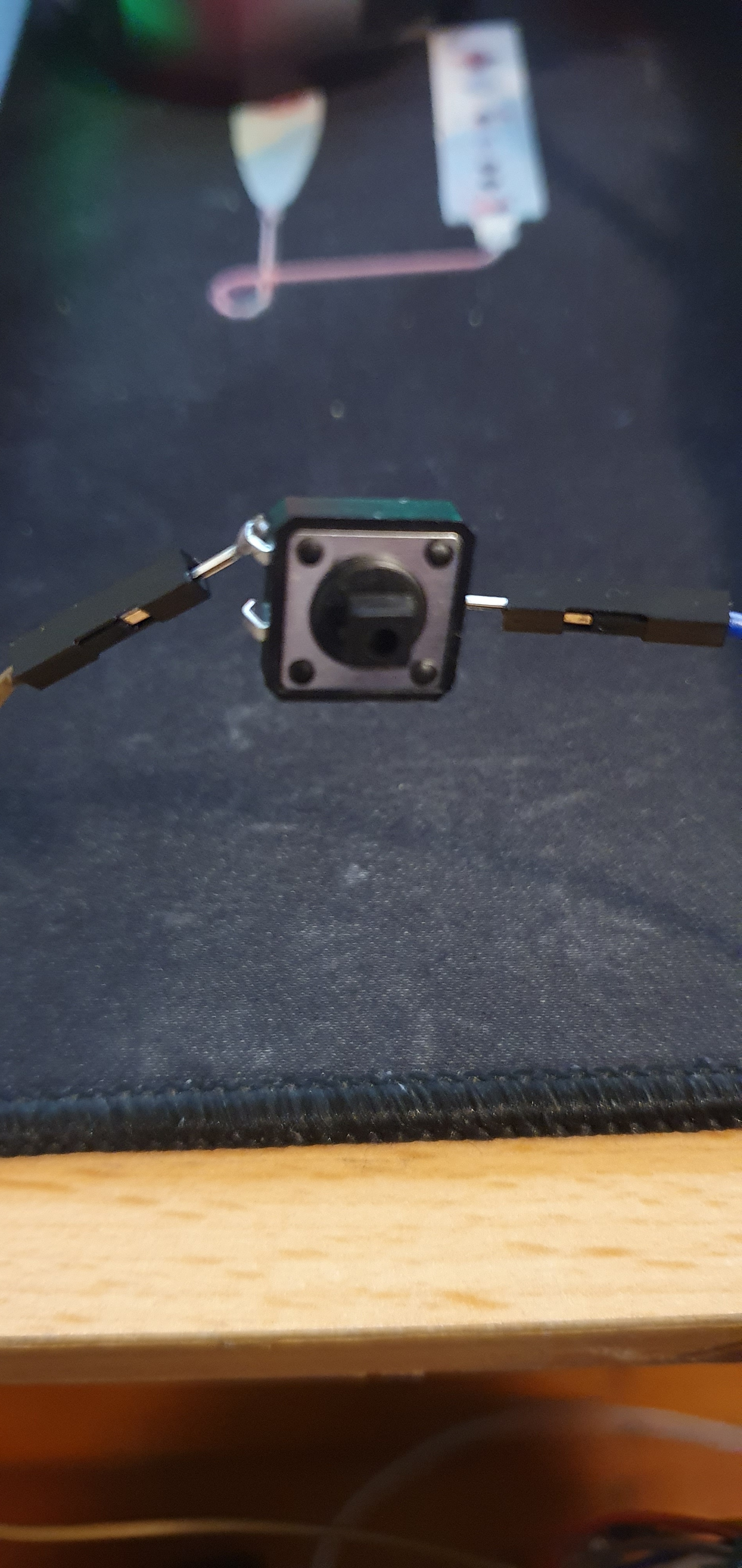
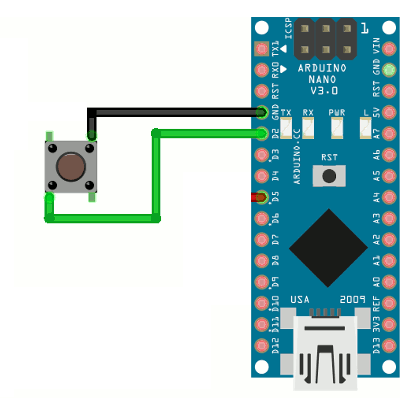
10. Laut Plan die restlichen zwei Jumper Wire an den Button löten
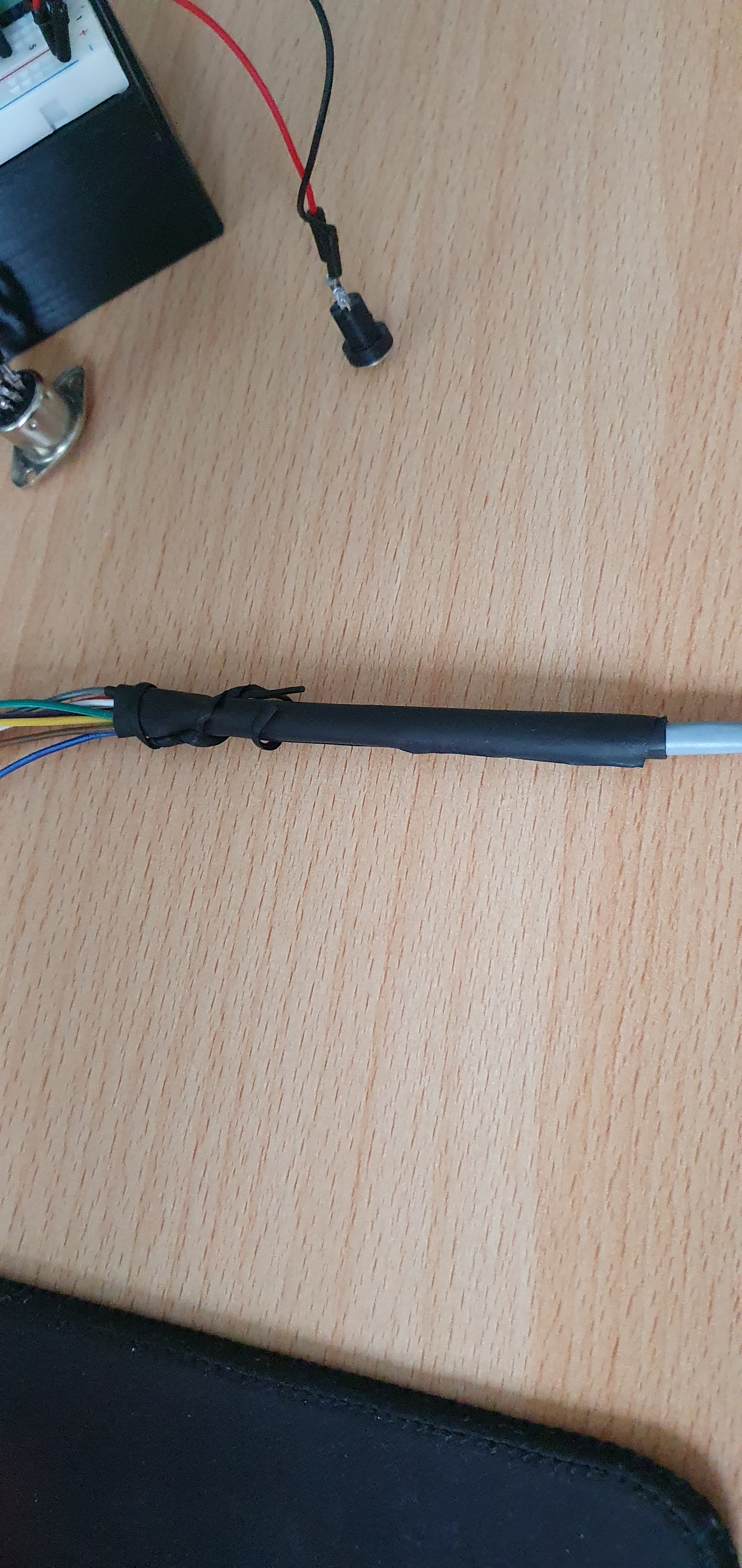
11. Nach dem Löten die offenen Kontakte mit Schrumpfschläuchen umklammern. -> Damit die offenen Kontakte nicht sich berühren.
Ergebnis:
6. Arduino Nano vorbereiten und programmieren
Als letztes muss nur noch das Arduino vorbereitet werden und programmiert werden, damit der Drag:On Controller einsatzfähig ist.
Den Code auf das Arduino Nano laden
1. Arduino an den PC stecken (vom Breadbord abstecken)
2. Arduino IDE starten
3. Code in der IDE öffnen. (Code bereitgestellt von André Zenner (DFKI, Germany) und Antonio Krüger (DFKI, Germany))
4.(https://github.com/scogswell/ArduinoSerialCommand) über GitHub SerialCommand Bibliothek downloaden und in die Arduino IDE einbinden
5. Darauf achten, dass Board, Processor und Port übereinstimmen mit dem ArduinoNano. In meinen Fall: Board:ArduinoNano, Processor: ATmega328P, Port: COM5
6. Dann den code kompilieren und auf das Board hochladen. Sollte ein maximal eine Minute dauern
7. Arduino ist einsatzbereit und kann wieder auf das Breadbord gesteckt werden
7. Hardware Tests
8. Controller Integration in Unity
...