Dieser Artikel zeigt den Aufbau des Drag:On Controllers.
Inhaltverzeichnis
- Vorbereitung der Materialien
- 3D-Druck Elemente vorbereiten
- 3D-Elemente
- 3D-Elemente im 3D Programm Ultimaker Cura vorbereiten
- 3D-Druck Elemente drucken
- Ausgedruckte 3D-Druck Elemente zusammenbauen
- Die Schaltung für den Controller aufbauen
- Arduino Nano vorbereiten und programmieren
- Hardware Tests
- Controller Integration in Unity
- Finish…
1. Vorbereitung der Materialien
Zu aller erst müssen alle Materialien besorgt werden. In der Nachfolgenden Tabelle sieht man welche Materialien benötigt werden für den Aufbau.
# | Material | Menge | Preis |
1 | Universal Netzteil | 1 | 13,70€ |
2 | Steuerleitung 8*0,14mm² | 10m | 7,50€ |
3 | MAS 80S DIN-Stecker, 8-polig, Hufeisenform | 1 | 0,56€ |
4 | MG996R Micro Digital Motor | 3 | 19,99€ |
5 | Stromversorgungsbuchse | 1 | 2,69€ |
6 | Kameraschraube ¼“ (12mm * 14mm) | 2 | 6,89€ |
7 | Tesa Powerstrips, Doppelseitig | 1 Packung | 3,99€ |
8 | Arduino Nano | 1 | 20,00€ |
9 | Taster (12mmx12mm) 7,3 4-polig THT quadratisch | 1 | 7,80€ |
10 | Vive Tracker | 1 | 119,99€ |
11 | Fächer | 2 | 32,00€ |
12 | PLA Filament (3D-Drucker) | 0,75kg | 15,95€ |
13 | Widerstand 10k Ohm, axial, 4W, 1% | 1 | 2,91€ |
14 | Keramik-Kondensator 10nF, 100V, 10% | 1 | 0,11€ |
15 | Steckboard | 1 | 3,80€ |
16 | MAS 8S DIN-Buchse, 8-polig, Hufeisenform | 1 | 0,99€ |
| 17 | Innensechskantschraube M3x20mm | 4 | 2,20€ |
| 18 | Innensechskantschraube M3x10mm | 10 | 2,20€ |
| 19 | Zylinderkopfschraube (Kreuz) M3x55mm | 2 | 5,38€ |
| 20 | M3 Scheiben | ~16 | 0,70€ |
| 21 | M3 Mutter | ~16 | 0,72€ |
Wenn alle Materialen beisammen sind, kann man mit dem Aufbau beginnen.
2. 3D-Druck Elemente vorbereiten
Zu Beginn brauchen wir alle erforderlichen Dateien. Die erforderlichen Daten werden von André Zenner und Antonio Krüger, DFKI - Saarland Information Campus, bereitgestellt. Bestehend aus insgesamt 8 Dateien kann man sein Drag:On VR Controller zusammenbauen.
2.1 3D-Elemente
Die folgenden Elemente müssen mit einem 3D-Drucker gedruckt werden, in diesem Fall ist der genutzte 3D-Drucker ein Anycube i3 Mega.
|
|
|
|---|---|---|
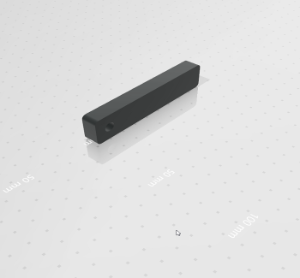
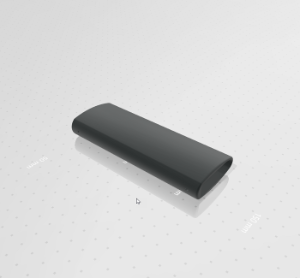
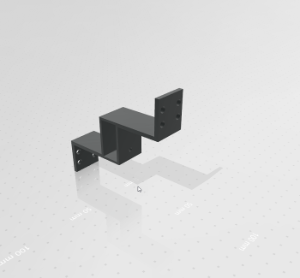
| 2. Brückenclip | 3. Fächerhebel |
 |
|
|
|---|---|---|
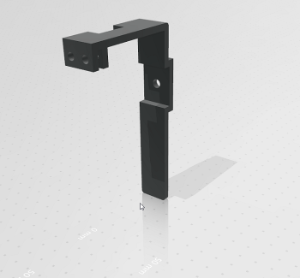
| 4. Griff Modul | 5. Kameraschraubenhalter | 6. Motor Modul |
| |
|---|---|
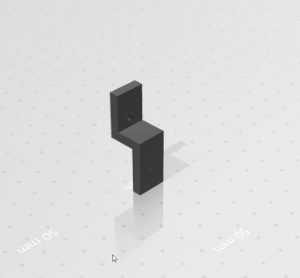
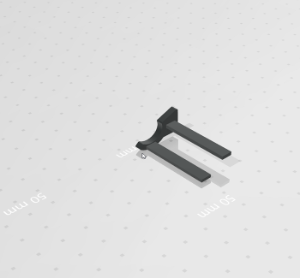
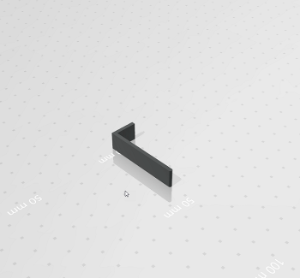
| 7. Tracker Modul | 8. Arm zum Sammeln des Fächers |
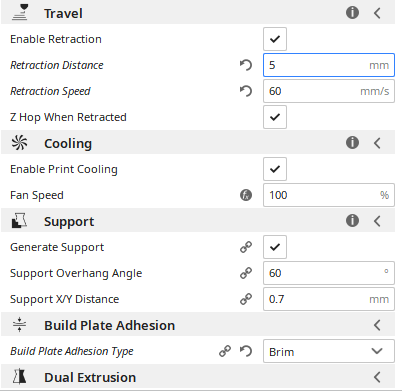
2.1 3D-Elemente im 3D Programm Ultimaker Cura vorbereiten
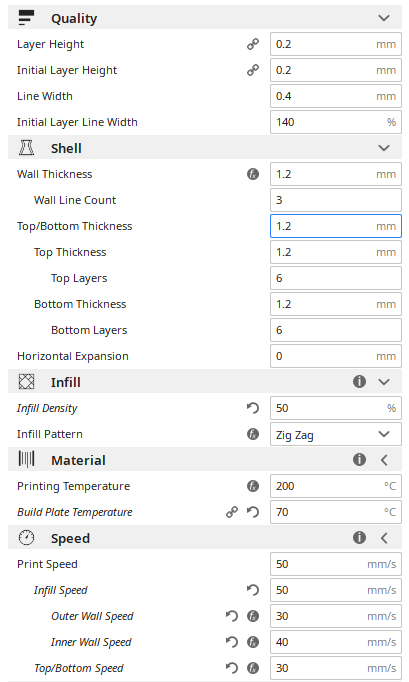
Aber um die 3D-Elemente im Drucker drucken können, müssen wir diese erst im einem 3D-Programm vorbereiten. Das Programm, das verwendet wird, heißt Ultimaker Cura. Mit dem können wir einstellen wie Stark die Fülldichte der Elemente sein sollen oder wie schnell sich die Düse bewegen soll usw.
|
|
|---|---|
| 2. Einstellungen vom Ultimaker Cura |
3. 3D-Druck Elemente drucken
Anzahl der 3D-Druckelemente
- 2x Brückenclip
- 2x Brücke
- 2x Motor Modul
- 4x Arm zum Sammeln des Fächers
- 1x Trackermodulaufsatz
- 2x Fächerhebel
- 1x Griffmodul
- ?x Kameraschraubenhalter
Brückenclip:
1.Versuch
Zeit: 17min
Mit Support und 25% Fülldichte
Support war nicht möglich abzunehmen vom Modul, ohne es zu brechen.
2.Versuch
Zeit: 23min
Ohne Support, 50% Fülldichte und Modul wurde um 90° gedreht.
Modul wurde um 90° gedreht, damit es ohne Support gedruckt werden kann. Zweiter Brückenclip wurde mit den gleichen Einstellungen ohne Probleme gedruckt.
Arm zum Sammeln des Fächers:
1.Versuch
Zeit: 38min
Ohne Support und 50% Fülldichte
Von diesem Modul werden vier Stück gebraucht. Deshalb wurden vier Stück gleichzeitig gedruckt.
Motormodulaufsatz:
1.Versuch
Zeit: 190min
Ohne Support, 50% Fülldichte und Module wurden um 90° gedreht.
Modul wurde um 90° gedreht, damit es ohne Support gedruckt werden kann. Von diesem Modul werden zwei Stück gebraucht. Deshalb wurden zwei Stück gleichzeitig gedruckt.
Kameraschraubenhalter:
1.Versuch
Zeit: 13min
Mit Support, 50% Fülldichte
2.Versuch
Zeit: 13min
Mit Support, 50% Fülldichte
Dieses Modul wurde diesmal mit Support gedruckt. Das Supportmaterial konnte einfach entfernt ohne, dass das eigentliche Modul beschädigt wurde.
Trackermodulaufsatz
1.Versuch
Zeit: 50min
Ohne Support, 50% Fülldichte und Modul wurde um 90° gedreht.
Modul wurde um 90° gedreht, damit es ohne Support gedruckt werden kann.
Fächerhebel
1.Versuch
Zeit: 72min
Ohne Support, 50% Fülldichte und Modul wurde um 90° gedreht.
2.Versuch
Zeit: 72min
Ohne Support, 50% Fülldichte und Modul wurde um 90° gedreht.
Modul wurde um 90° gedreht, damit es ohne Support gedruckt werden kann.
Brücke
1.Versuch
Zeit: 200min
Ohne Support, 50% Fülldichte und Modul wurde um 90° gedreht.
Modul wurde um 90° gedreht, damit es ohne Support gedruckt werden kann. Von diesem Modul werden zwei Stück gebraucht. Deshalb wurden zwei Stück gleichzeitig gedruckt.
Griffmodul
1.Versuch
Zeit: 235min
Ohne Support, 50% Fülldichte und Modul wurde um 90° gedreht.
Modul wurde um 90° gedreht, damit es ohne Support gedruckt werden kann.
Insgesamt wurde für den Druck aller Elemente 2210 min (36,83 Std.) gebraucht.
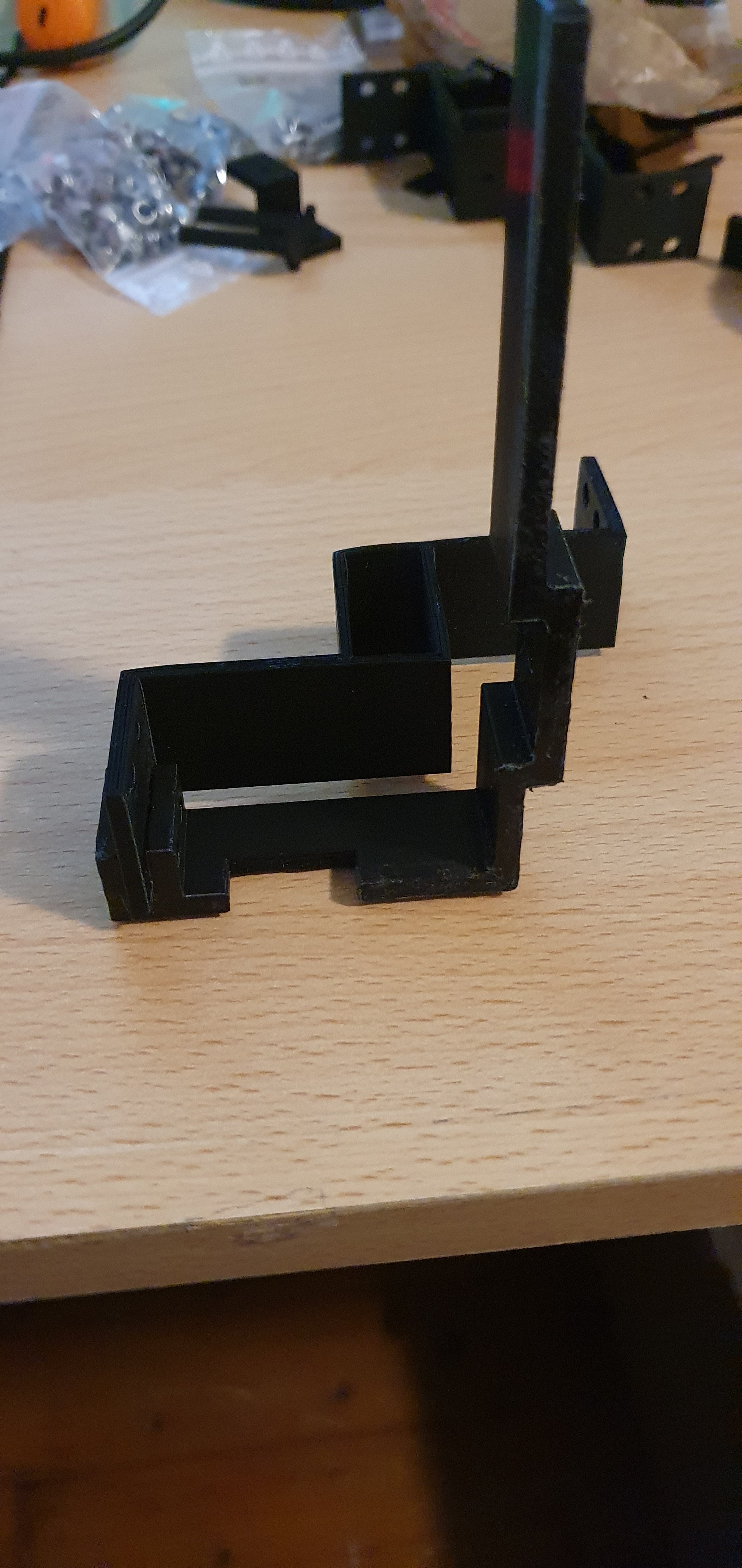
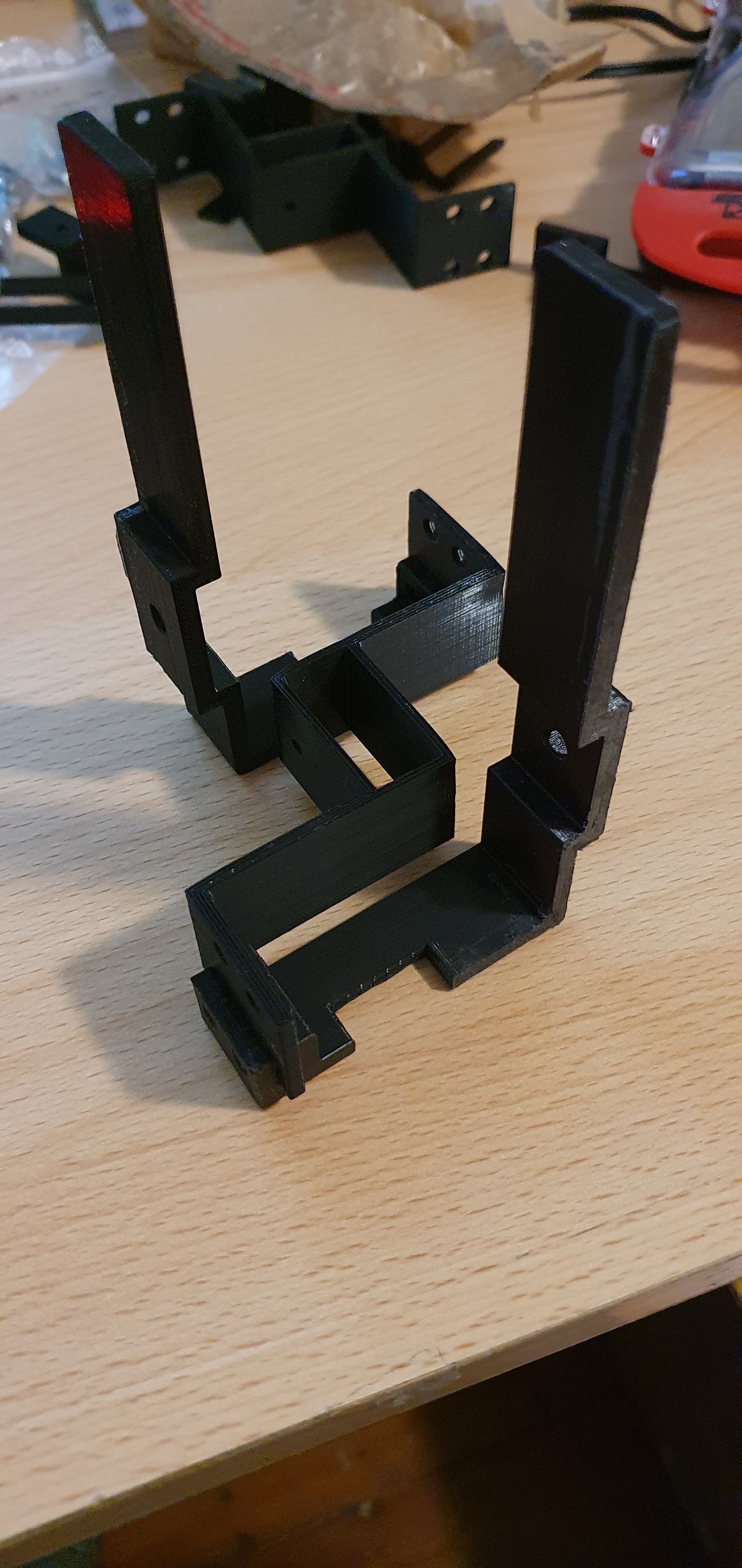
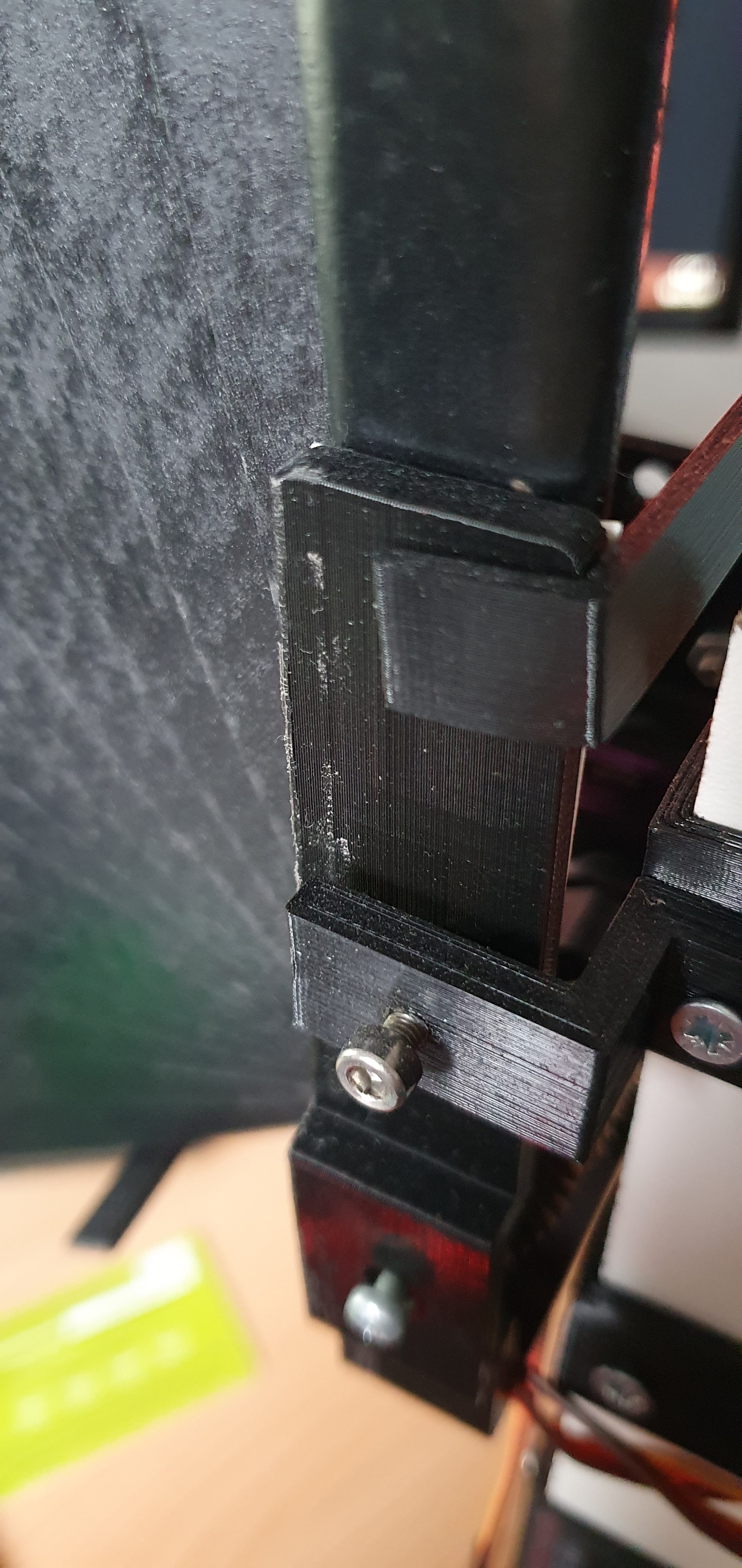
4. Ausgedruckte 3D-Druck Elemente zusammenbauen
Nach dem Druck sollten alle Teile sauber gemacht. Es empfiehlt sich mit einem Elektro Mini Grinder die 3D-Teile zu schleifen bzw. zu säubern. Ist dies erledigt kann man mit dem Aufbauen beginnen.
Zusammenbau der 3D Teile:
1. Ein Brücken-teil mit dem Motormodul zusammenstecken bzw. schrauben (Die genutzten Schrauben M3*20mm mit M3 Muttern)
2. Das zweite Brücken-teil mit dem Motormodul zusammenstecken (Die genutzten Schrauben M3*20mm mit M3 Muttern)
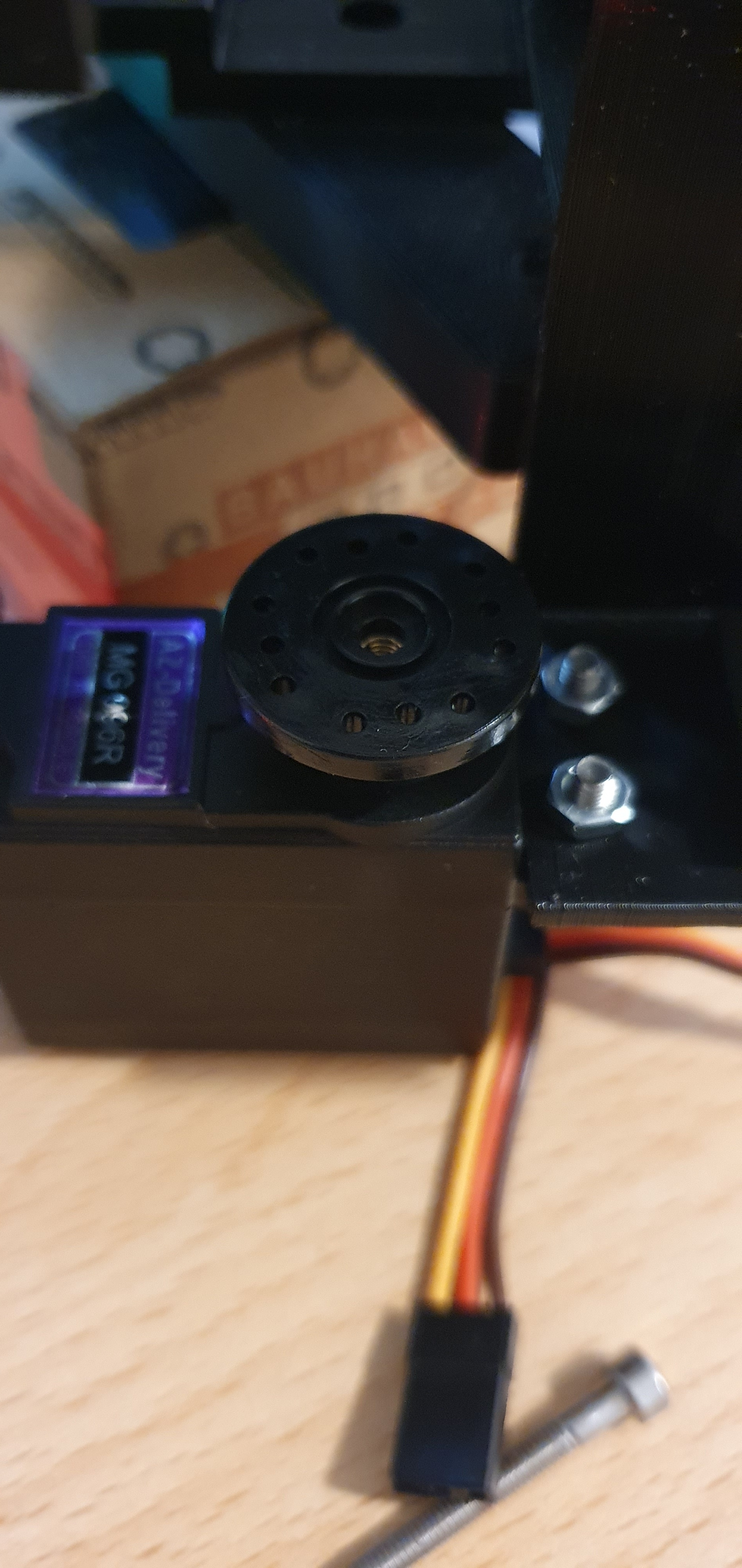
3. Die Motoren an die Brücken-teile anschrauben (Die genutzten Schrauben M3*10mm mit M3 Muttern)
4. Die Rad Komponente auf die Motoren stecken
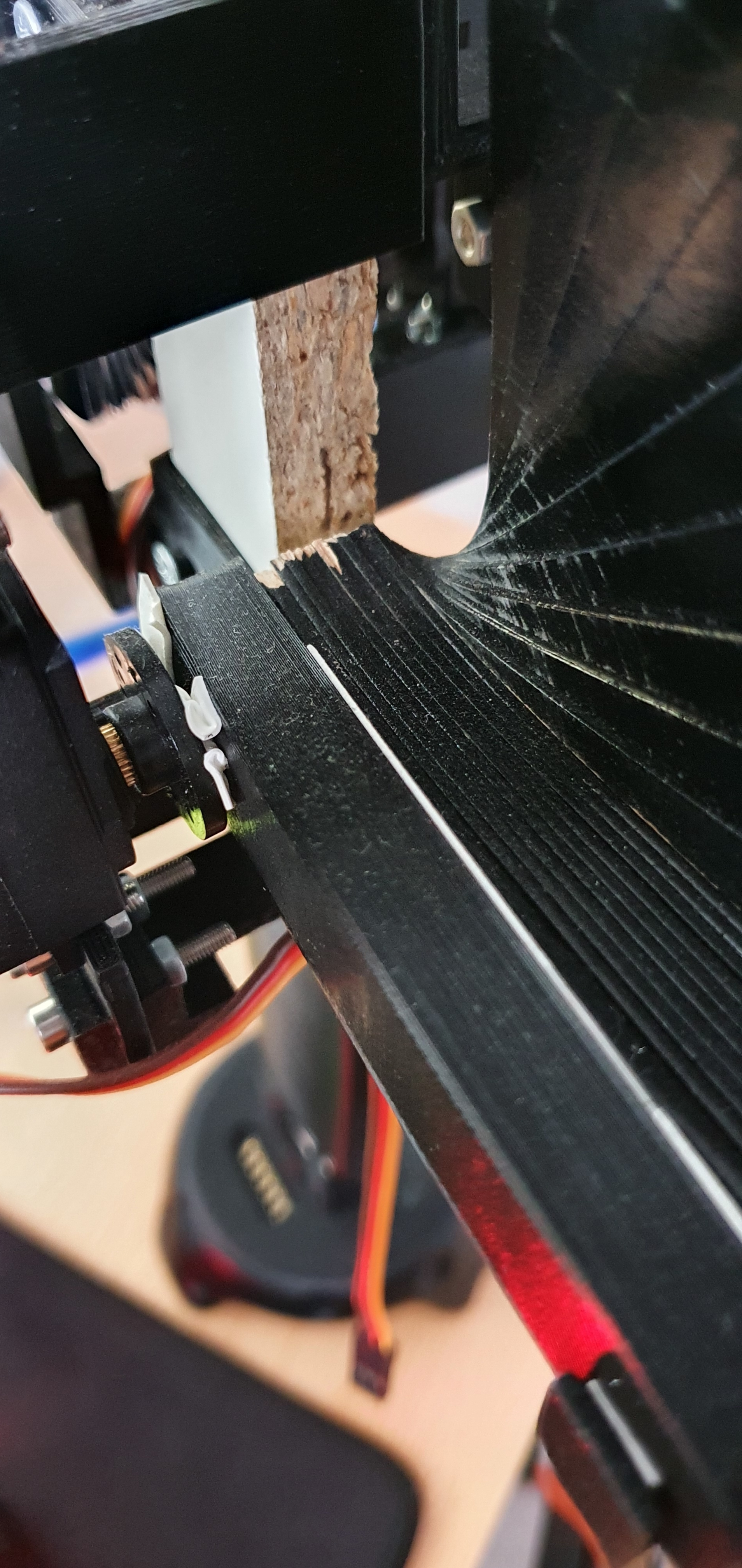
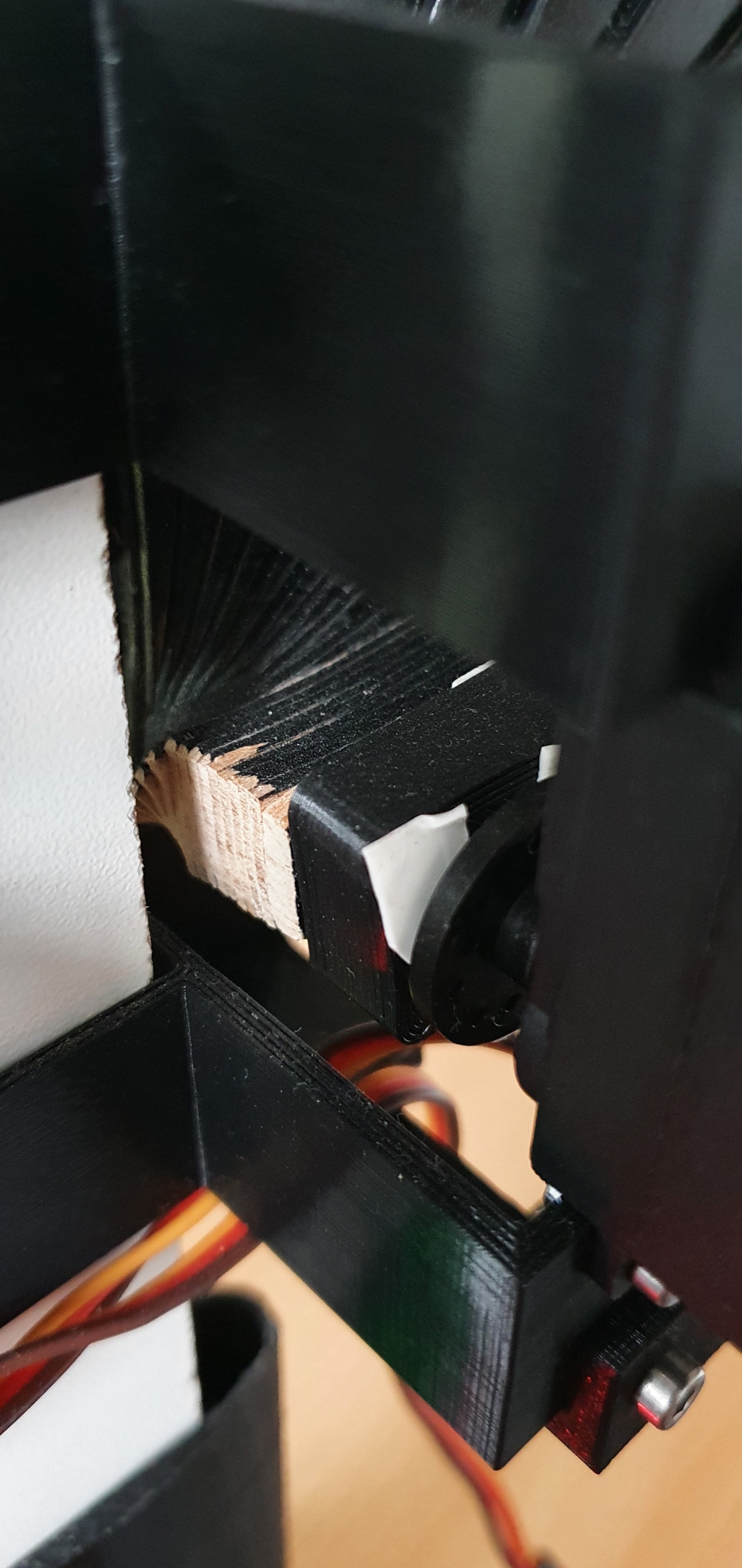
5. Das Holzstück mit den Maßen L/B/H 290/30/13 mm in die Motormodule stecken
6. Das Motormodul an das Holzstück schrauben. jeweils oben und unten des Motormodules. (Holzbauschraube 2mm*12mm)
7. Den Brückenklip an das Motormodul schrauben sowie an die Brücke mit einer M3*10mm
8. Die Kameraschraube (Maße 1/4 Schraube mit Durchmesser von 12mm und Länge 14mm) in das Trackermodul stecken, damit das Gewinde unten rausguckt.
9. Trackermodul mit der Schraube an einen HTC Vive Tracker Schrauben
10. Als nächstes steckt man den unteren Teil des Holzstückes in das Griff Modul und befestigt das Griff Modul an das Holz mit Holzbauschrauben.
11. Das Trackermodul mitsamt Tracker an das Holzstück mit den Holzbauschraube schrauben

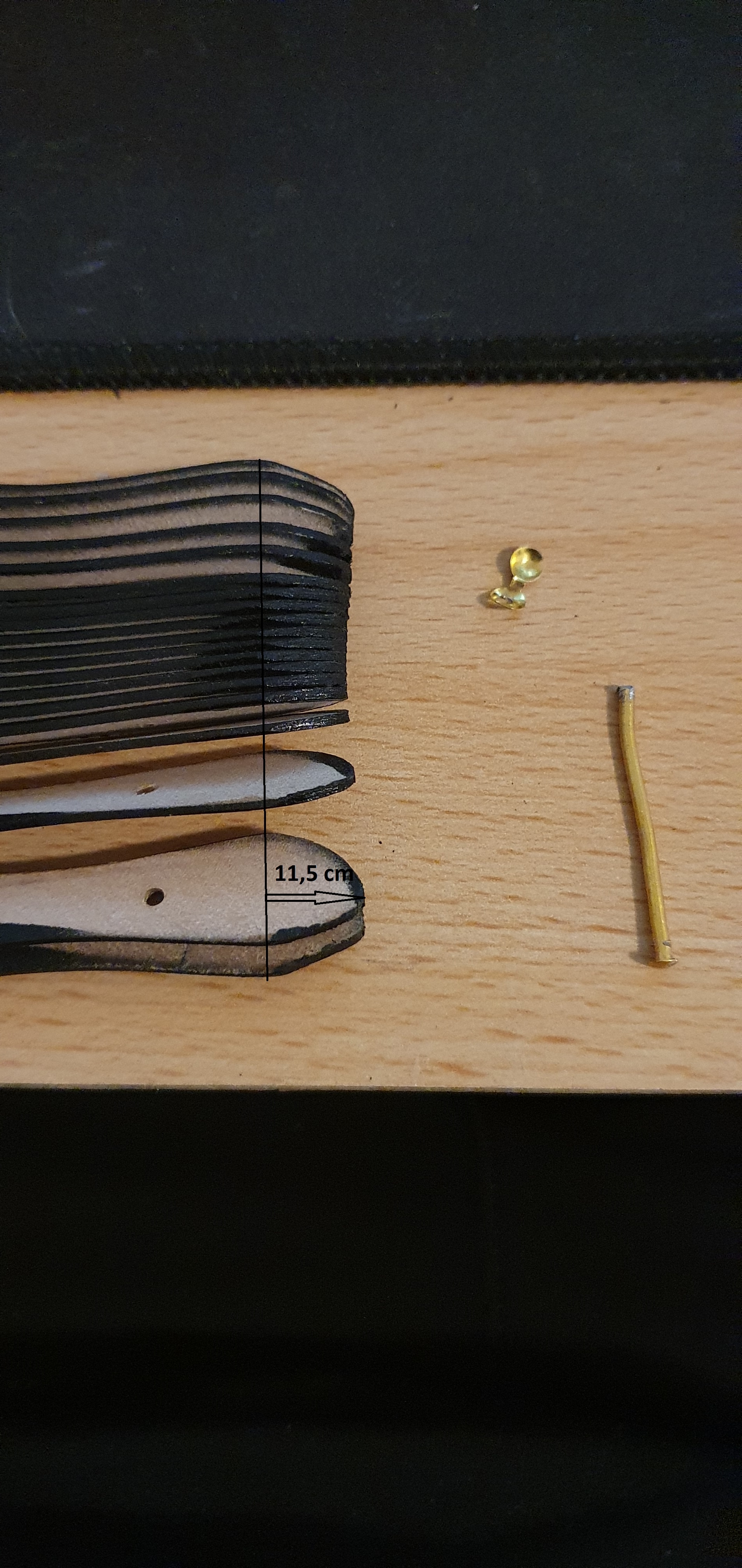
12. Fächer vorbereiten - den Stift aus dem Fächer und die Löcher vorbereiten, dass die M3*55mm Schraube hinein passt.
13. Es müssen 11.5mm vom der Fächer abgesägt werden, damit sich die Fächer öffnen können.
14. Ein M3 Mutter in die Fächerhebel legen.
15. Einen doppelseitigen Selbstklebestrip auf den Fächerhebel kleben
16. Auf die Rad Komponente rund herum auch den doppelseitigen Selbstklebestrip kleben (Nicht die Mitte zu kleben)
17. Auf die Innenseite vom Brücken-teil auch einen Streifen vom doppelseitigen Selbstklebestrip kleben
18. Einen kleinen Streifen vom doppelseitigen Selbstklebestrip auf die kurze Seite von dem Arm zum Sammeln vom Fächer kleben
19. Die Fächerhebel Komponente auf die Rad Komponente kleben
20. Den Fächer auf die Fächerhebel Komponente kleben
21. Dann durch den Fächer, der Fächerhebel Komponente und zum Schluss in den Motor eine M3*55mm Schraube drehen.
22. Mit einer Holzbauschraube den Brückenclip in das Holzstück und dem Motormodul schrauben und in die anderen Seite vom Brückenclip eine M3*10mm Schraube schrauben mit einer M3 Mutter auf der anderen Seite
23. Jeweils ein Brückenclip an die Seite vom Fächerhebel kleben und ein Brückenclip an die Brücke kleben
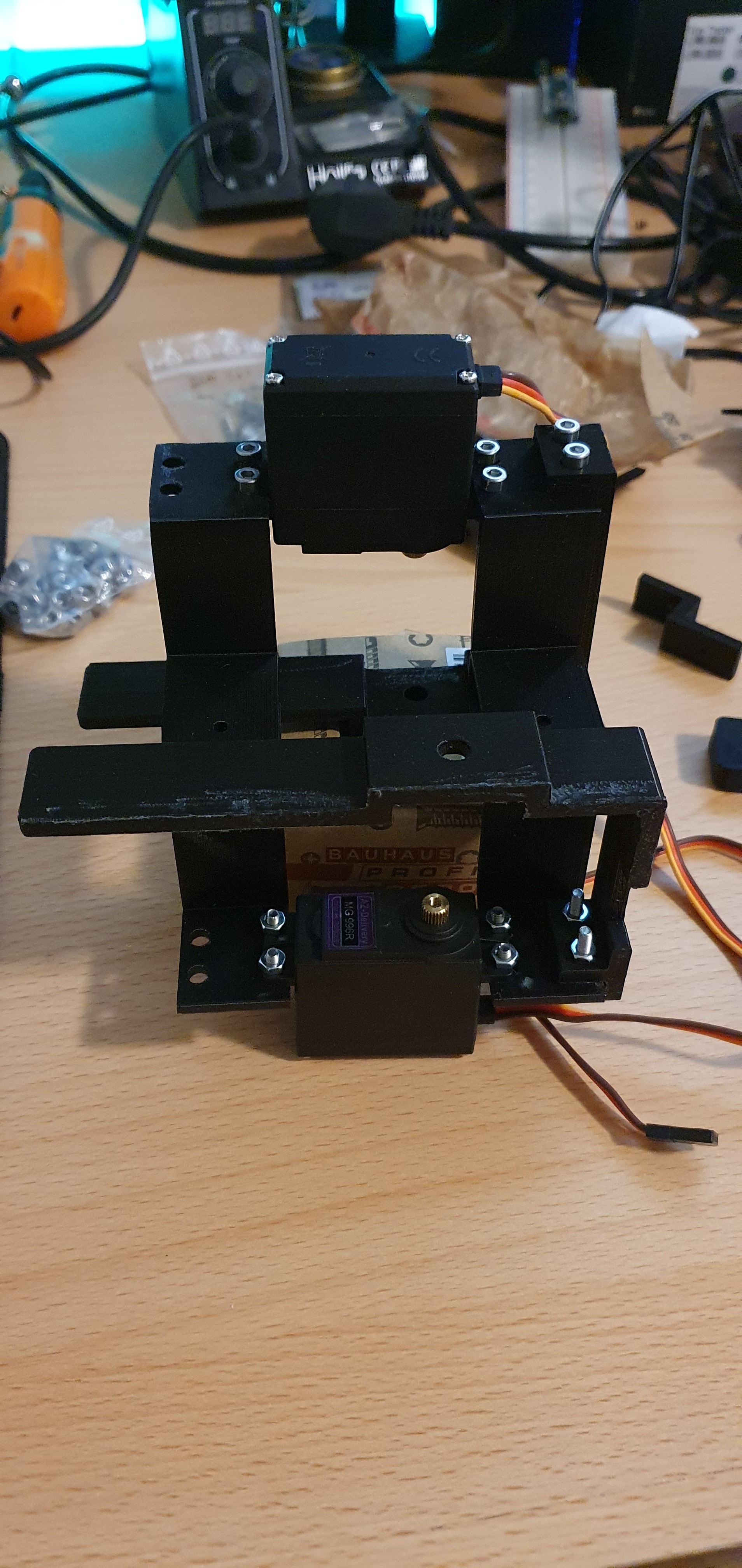
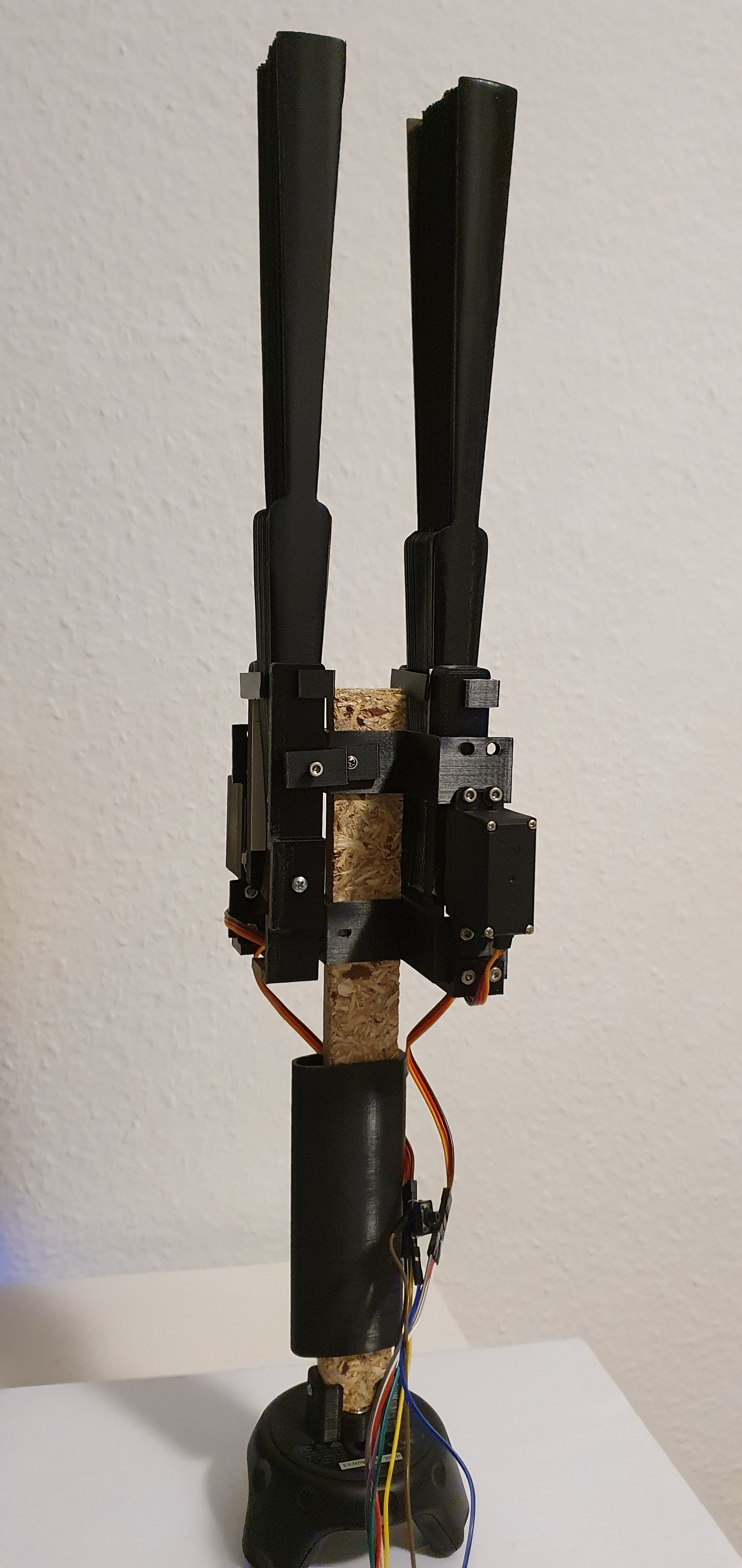
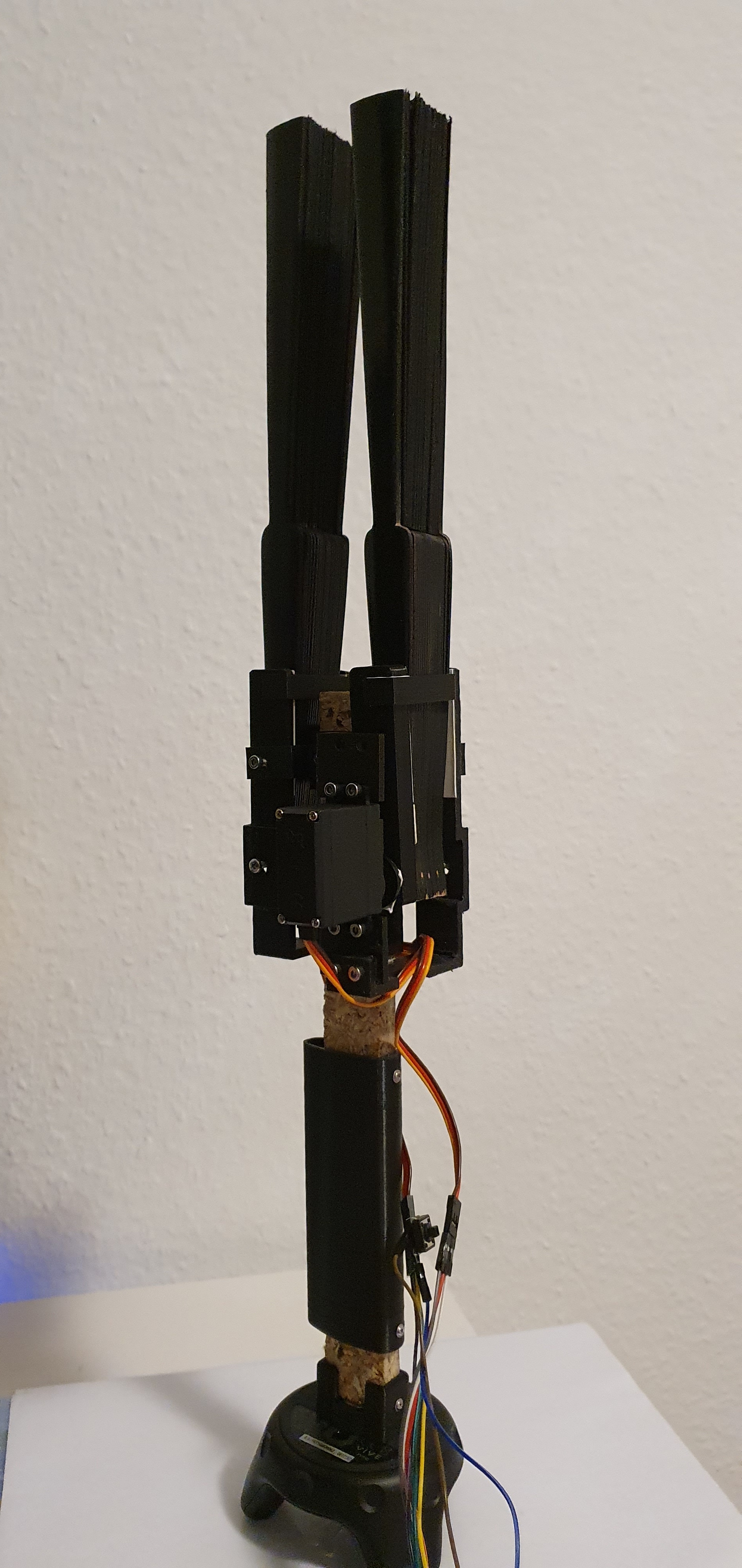
Das Ergebnis:


5. Die Schaltung für den Controller aufbauen
Nach dem Zusammenbau der Drag:On Controller, muss jetzt noch die Elektronik zusammengebaut werden.
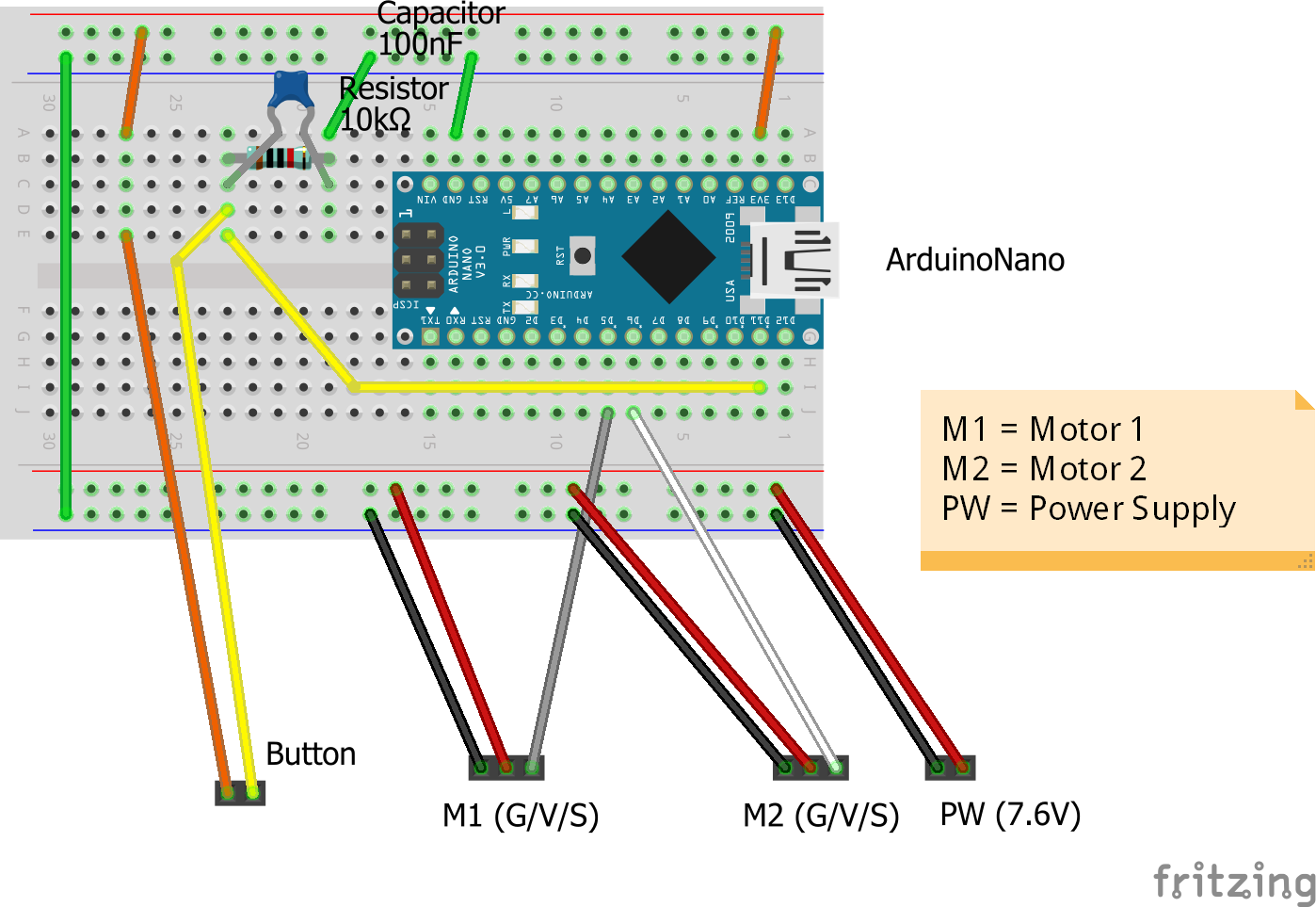
Zusammenbau der Elektrik
1. Den Arduino Nano in Spalten C-G und Reihe 1-15 stecken
2. Widerstand in Spalte B und Reihe 19, 23 stecken
3. Kondensator in Spalte C und Reihe 19, 23 stecken
4. Anschließend die Jumper Wire wie folgt anstecken:
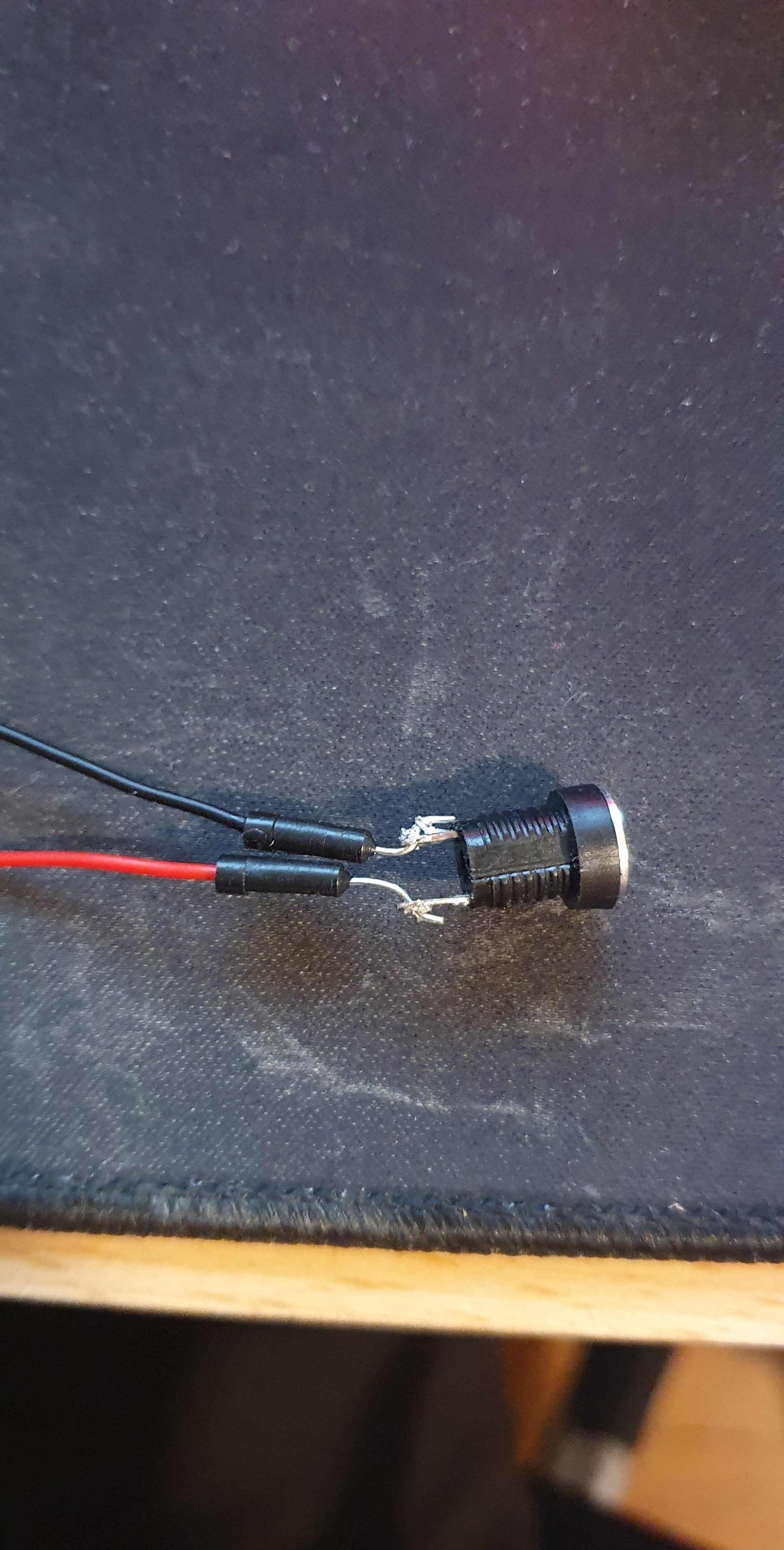
5. Ein Jumper Wire an den Lötanschluss vom DC Power Jack anschließen (Der längere Anschluss ist positiv der kürzere ist negativ)
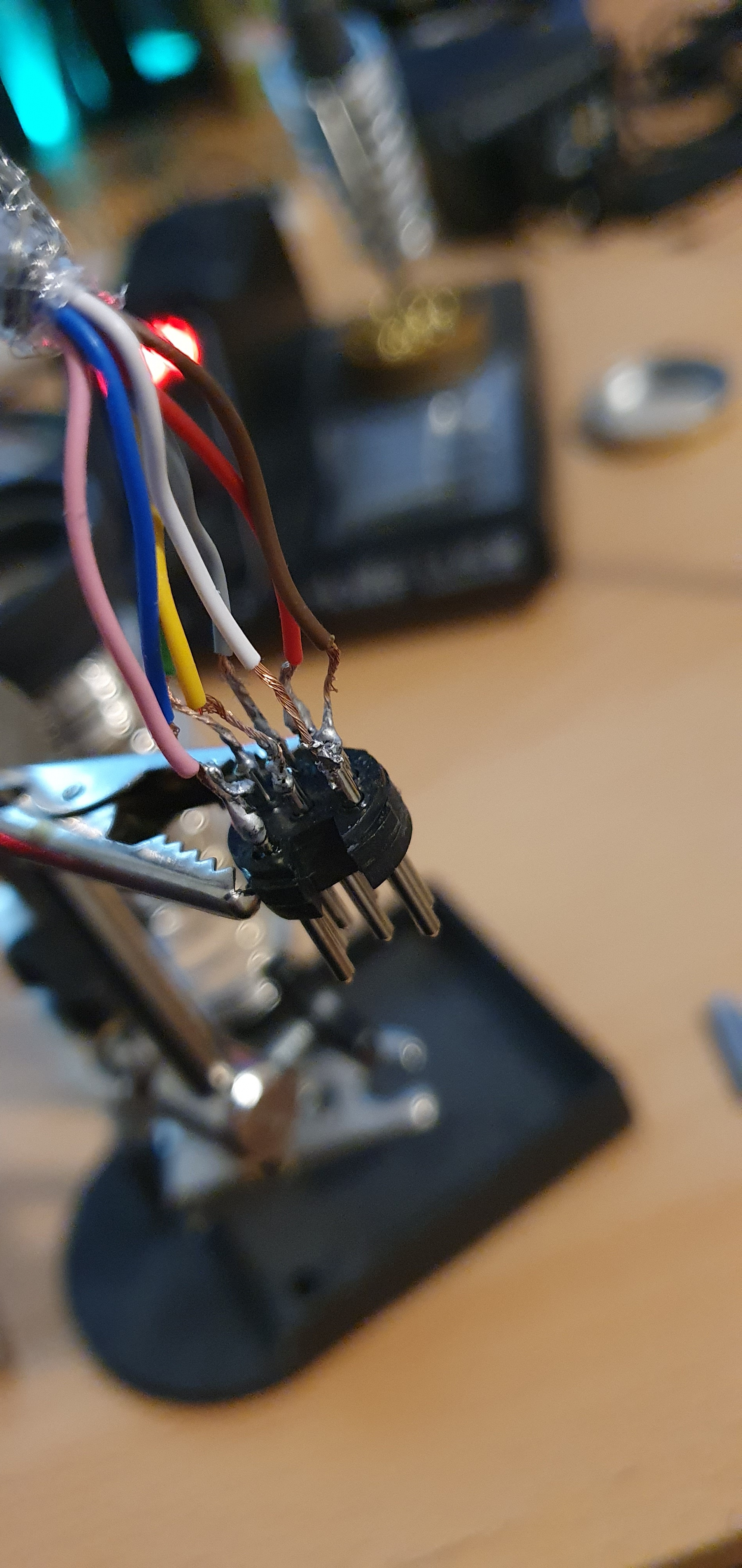
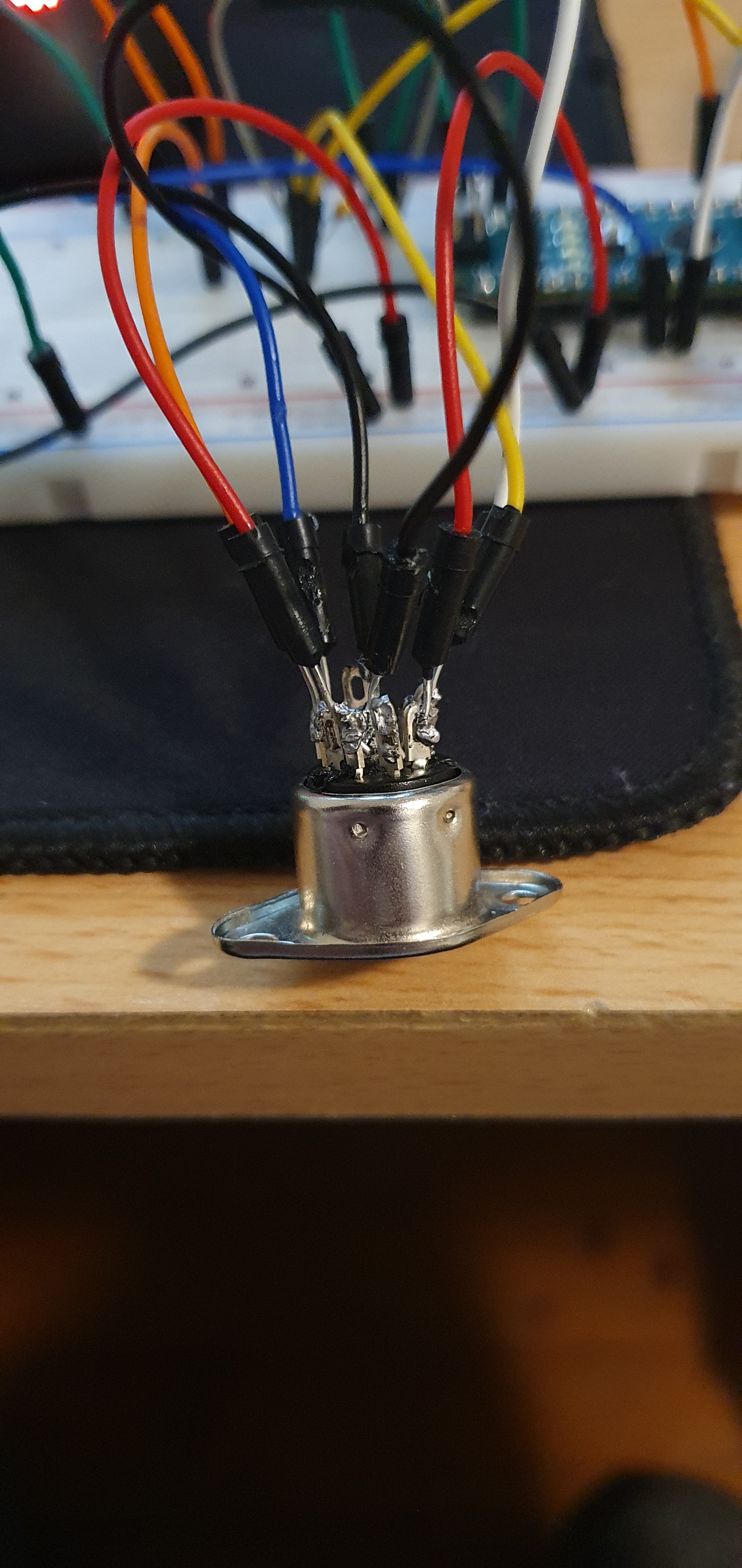
6. Die 8-polige Steuerleitung an den 8-polige DIN-Stecker löten

7. 8 Pin DIN Female Stecker laut Plan (siehe Bild) löten:
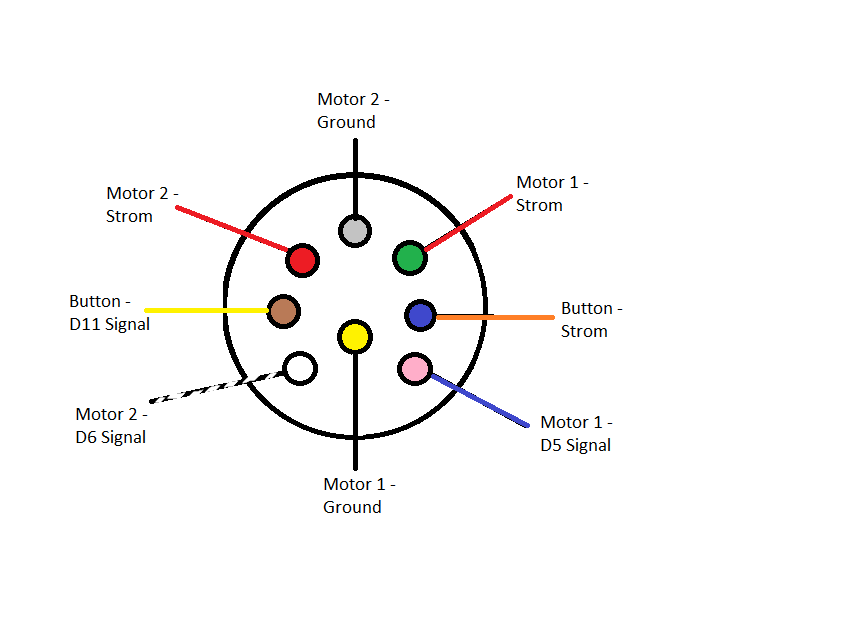
8. Die andere Seite die 8-polige Steuerleitung löten an jeden Pol ein Jumper Wire an

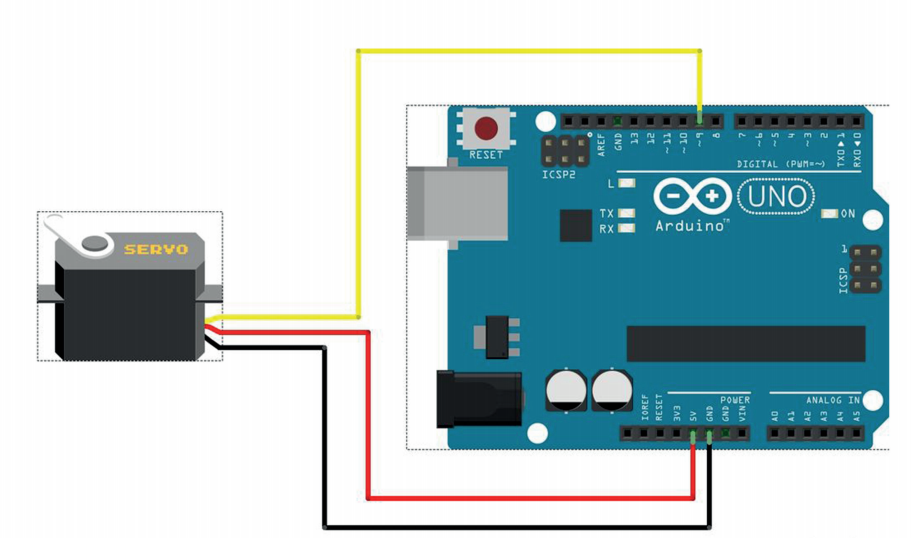
9. Dann die Jumper Wire laut Plan an die Servo Motoren stecken
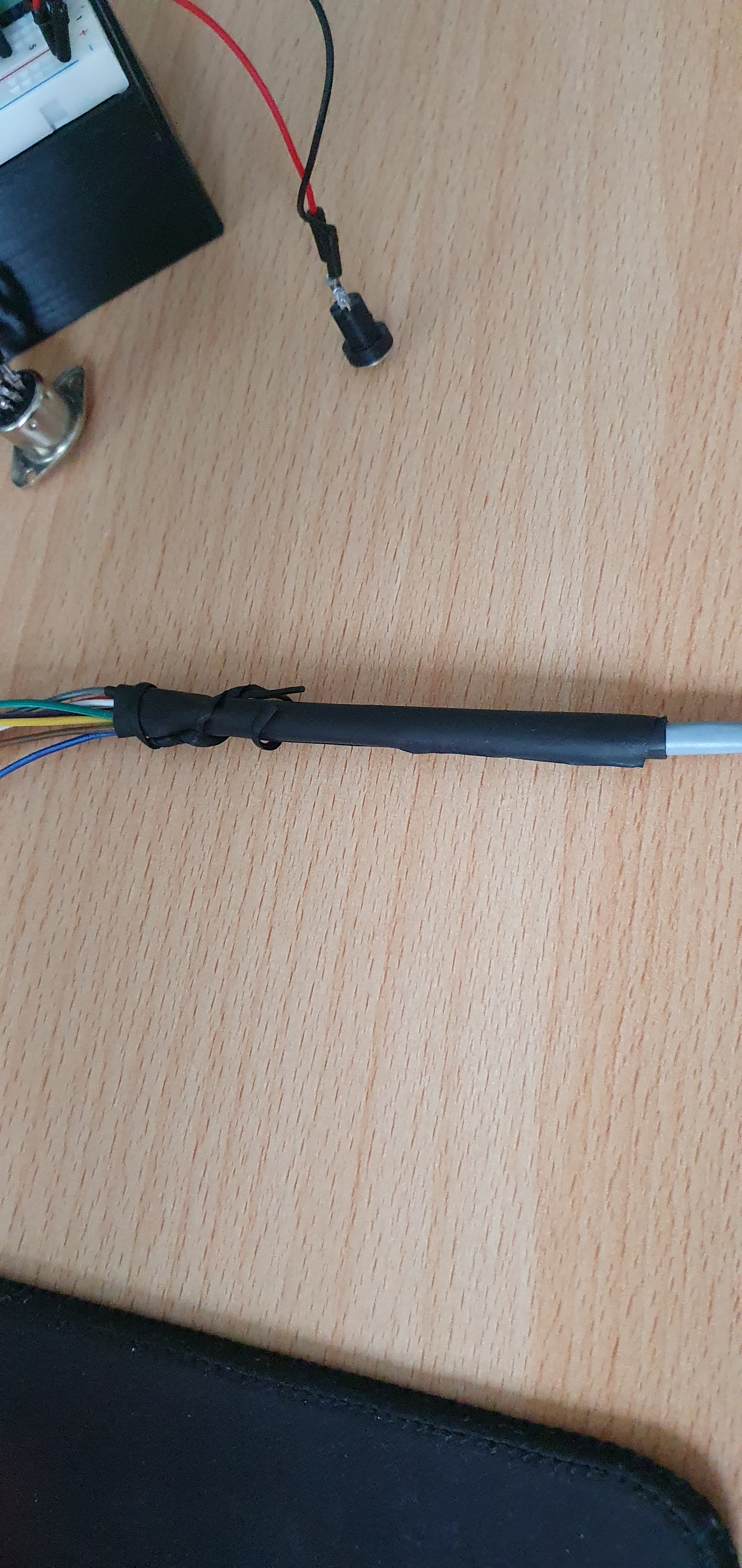
10. Laut Plan die restlichen zwei Jumper Wire an den Button löten
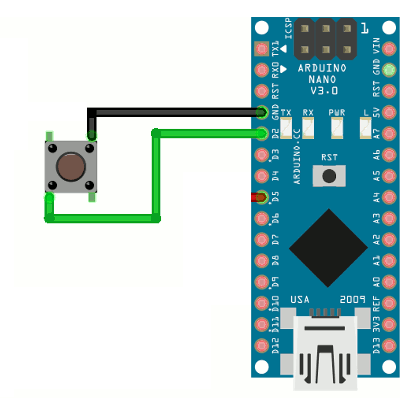
11. Nach dem Löten die offenen Kontakte mit Schrumpfschläuchen umklammern. -> Damit die offenen Kontakte nicht sich berühren.
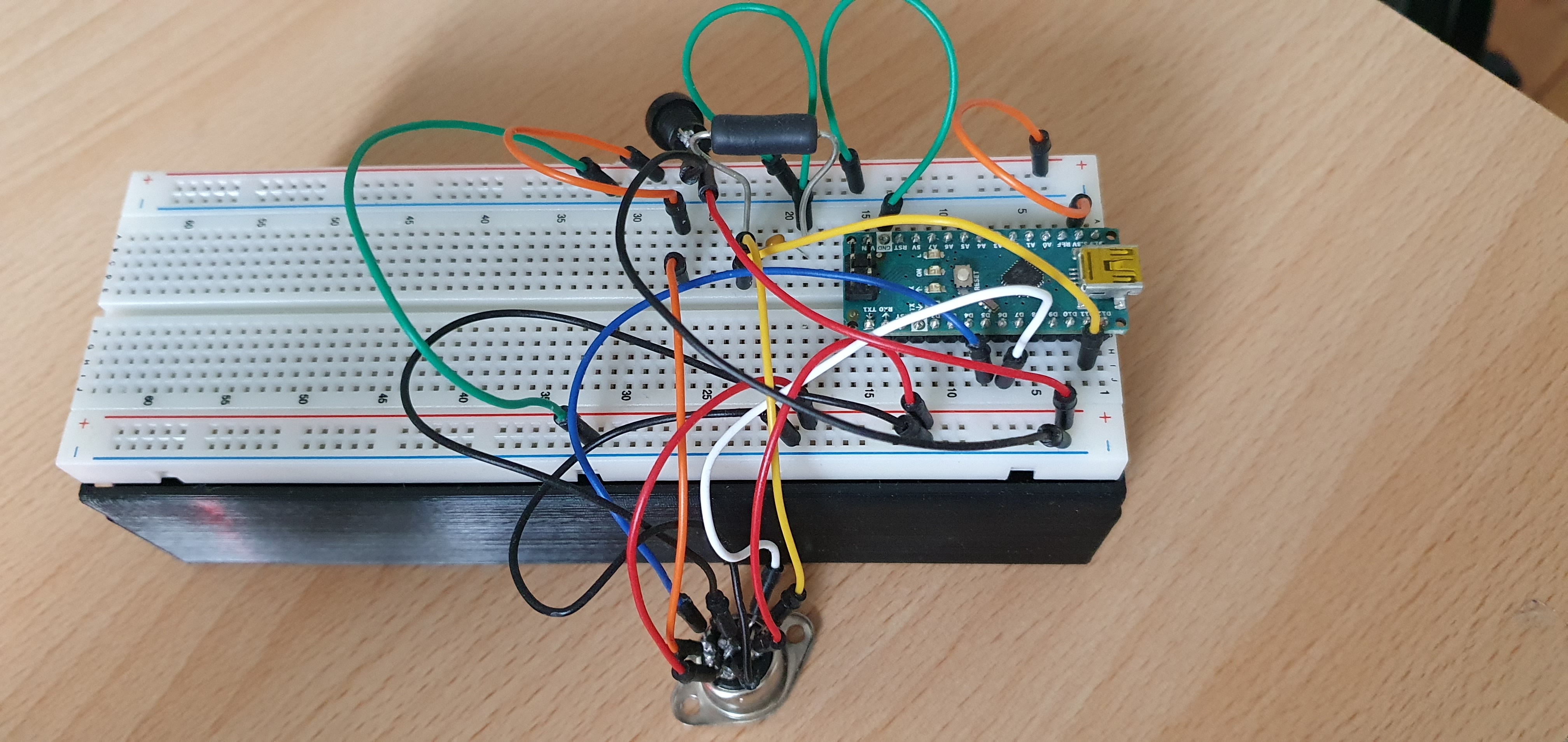
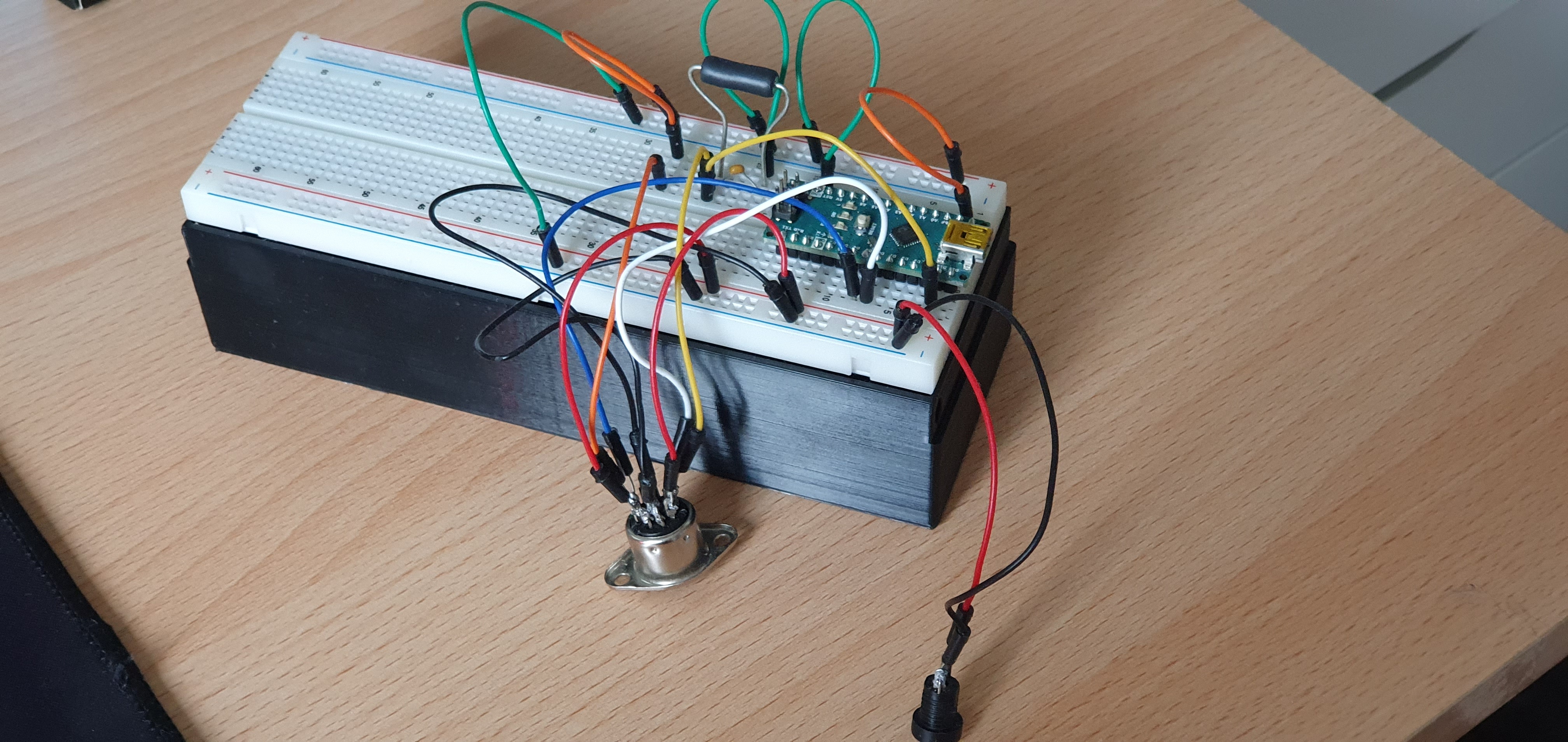
Ergebnis:
6. Arduino Nano vorbereiten und programmieren
Als letztes muss nur noch das Arduino vorbereitet werden und programmiert werden, damit der Drag:On Controller einsatzfähig ist.
Den Code auf das Arduino Nano laden
1. Arduino an den PC stecken (vom Breadbord abstecken)
2. Arduino IDE starten
3. Code in der IDE öffnen. (Code bereitgestellt von André Zenner (DFKI, Germany) und Antonio Krüger (DFKI, Germany))
4.(https://github.com/scogswell/ArduinoSerialCommand) über GitHub SerialCommand Bibliothek downloaden und in die Arduino IDE einbinden
5. Darauf achten, dass Board, Processor und Port übereinstimmen mit dem ArduinoNano. In meinen Fall: Board:ArduinoNano, Processor: ATmega328P, Port: COM5
6. Dann den Code kompilieren und auf das Board hochladen. Sollte ein maximal eine Minute dauern
7. Arduino ist einsatzbereit und kann wieder auf das Breadbord gesteckt werden
7. Hardware Tests
Erster Test: Standalone
Ganz Wichtig: Zuerst muss der Arduino mit Strom versorgt werden (an den PC schließen) bevor das Board extern über Power Jack Strom bekommt!
1. Für den den Standalone Modus muss man den Button gedrückt halten während der Arduino hochfährt
2. Man erkennt den Standalone Modus daran, dass das Licht 10 mal blinkt
3. Ist der Arduino hochgefahren kann jetzt auch extern Strom angeschlossen werden
4. Als nächstes sollte der DIN-Stecker angeschlossen werden
5. Ist man im Standalone Modus bewegen sich die Fächer bei jeden Button druck
6. Klappte ganz gut am Anfang, aber die Fächer haben sich leicht gelöst, entweder vom Fächerhebel oder vom Motor selber
Zweiter Test: Standalone
Der zweite Test lief super nach dem korrigieren des Klebeband lösen sich die Fächer nicht mehr sofort vom Fächerhebel.